Nano 33 BLE Senseをデータ入力に使う<BLE>⑩9軸慣性センサ<BLEセントラル>
9軸慣性センサ LSM9DS1のBLEペリフェラルを受けるために、BLEのセントラルをmatlabで記述します。
●準備
LSM9DS1が接続するBLEペリフェラルは、前回と同じaddress(88A2EDC9F60C)を使って接続に行きます。
clear
scan = blelist("Timeout", 30)
Nano33BLE_address="88A2EDC9F60C"; % scanで見つかったアドレスを代入
b = ble(Nano33BLE_address);
●プログラム
前回、3種類のペリフェラルのスケッチを作りました。
- 9軸のデータをそれぞれ実数で送る(UUIDは9個)
- 9軸のうち二つを組み合わせて文字列で送る(UUIDは5個)
- 9軸のデータのaccelerationのxyz、gyroscopeのxyz、magneticFieldのxyzを組み合わせて文字列で送る(UUIDは3個)
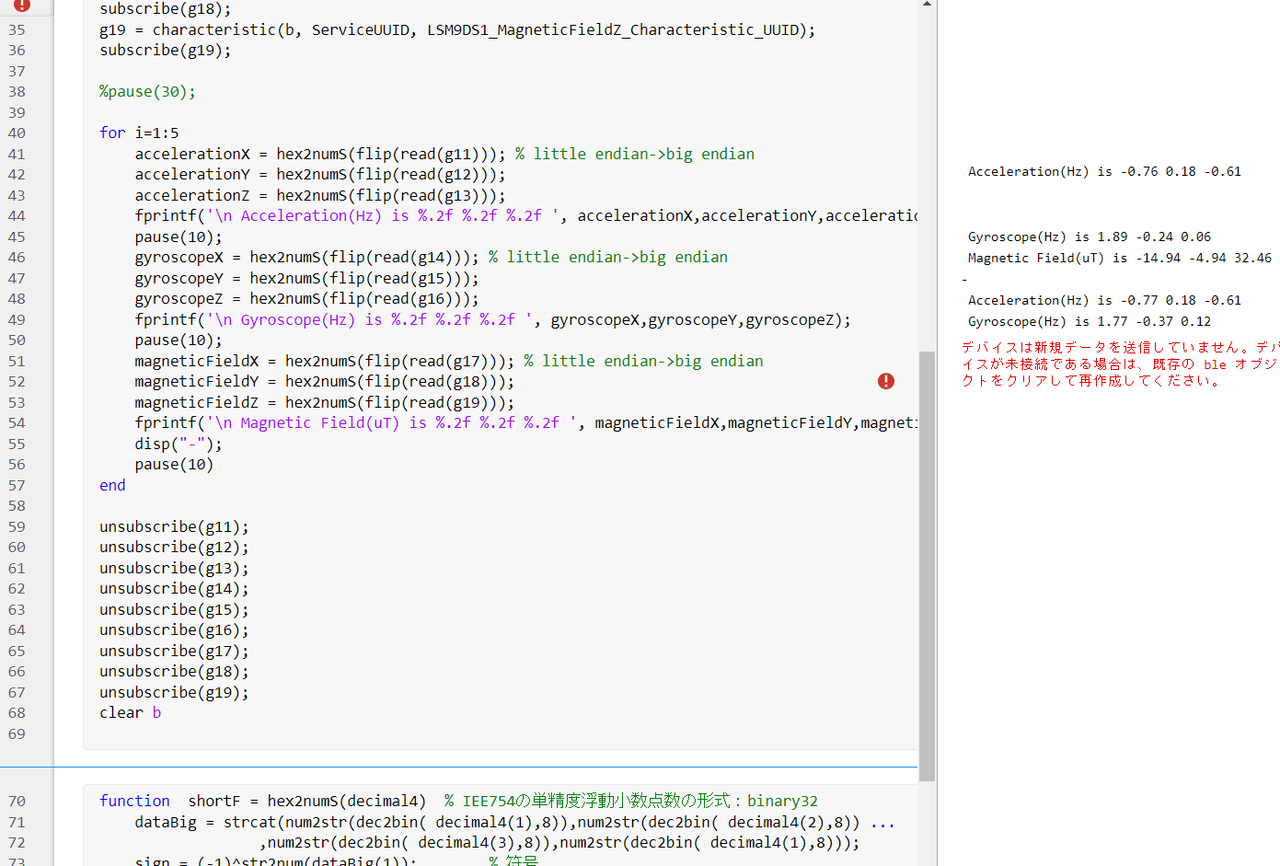
最初は、実数でデータが送られてきます。hex2numS()ファンクションで、IEEE754のフォーマットで送られてくるデータを実数に戻します。
clear
scan = blelist("Timeout", 20);
Nano33BLE_address="88A2EDC9F60C"; % scanで見つかったアドレスを代入
b = ble(Nano33BLE_address);
% LSM9DS1
ServiceUUID = "F000AC00-0451-4000-B000-000000000000";
LSM9DS1_AccelerationX_Characteristic_UUID = "F000AC01-0451-4000-B000-000000000000";
LSM9DS1_AccelerationY_Characteristic_UUID = "F000AC02-0451-4000-B000-000000000000";
LSM9DS1_AccelerationZ_Characteristic_UUID = "F000AC03-0451-4000-B000-000000000000";
LSM9DS1_GyroscopeX_Characteristic_UUID = "F000AC04-0451-4000-B000-000000000000";
LSM9DS1_GyroscopeY_Characteristic_UUID = "F000AC05-0451-4000-B000-000000000000";
LSM9DS1_GyroscopeZ_Characteristic_UUID = "F000AC06-0451-4000-B000-000000000000";
LSM9DS1_MagneticFieldX_Characteristic_UUID = "F000AC07-0451-4000-B000-000000000000";
LSM9DS1_MagneticFieldY_Characteristic_UUID = "F000AC08-0451-4000-B000-000000000000";
LSM9DS1_MagneticFieldZ_Characteristic_UUID = "F000AC09-0451-4000-B000-000000000000";
g11 = characteristic(b, ServiceUUID, LSM9DS1_AccelerationX_Characteristic_UUID); % 配列
subscribe(g11); % Notify
g12 = characteristic(b, ServiceUUID, LSM9DS1_AccelerationY_Characteristic_UUID);
subscribe(g12);
g13 = characteristic(b, ServiceUUID, LSM9DS1_AccelerationZ_Characteristic_UUID);
subscribe(g13);
g14 = characteristic(b, ServiceUUID, LSM9DS1_GyroscopeX_Characteristic_UUID);
subscribe(g14);
g15 = characteristic(b, ServiceUUID, LSM9DS1_GyroscopeY_Characteristic_UUID);
subscribe(g15);
g16 = characteristic(b, ServiceUUID, LSM9DS1_GyroscopeZ_Characteristic_UUID);
subscribe(g16);
g17 = characteristic(b, ServiceUUID, LSM9DS1_MagneticFieldX_Characteristic_UUID);
subscribe(g17);
g18 = characteristic(b, ServiceUUID, LSM9DS1_MagneticFieldY_Characteristic_UUID);
subscribe(g18);
g19 = characteristic(b, ServiceUUID, LSM9DS1_MagneticFieldZ_Characteristic_UUID);
subscribe(g19);
%pause(30);
for i=1:5
accelerationX = hex2numS(flip(read(g11))); % little endian->big endian
accelerationY = hex2numS(flip(read(g12)));
accelerationZ = hex2numS(flip(read(g13)));
fprintf('\n Acceleration(Hz) is %.2f %.2f %.2f ', accelerationX,accelerationY,accelerationZ);
pause(10);
gyroscopeX = hex2numS(flip(read(g14))); % little endian->big endian
gyroscopeY = hex2numS(flip(read(g15)));
gyroscopeZ = hex2numS(flip(read(g16)));
fprintf('\n Gyroscope(Hz) is %.2f %.2f %.2f ', gyroscopeX,gyroscopeY,gyroscopeZ);
pause(10);
magneticFieldX = hex2numS(flip(read(g17))); % little endian->big endian
magneticFieldY = hex2numS(flip(read(g18)));
magneticFieldZ = hex2numS(flip(read(g19)));
fprintf('\n Magnetic Field(uT) is %.2f %.2f %.2f ', magneticFieldX,magneticFieldY,magneticFieldZ);
disp("-");
pause(10)
end
unsubscribe(g11);
unsubscribe(g12);
unsubscribe(g13);
unsubscribe(g14);
unsubscribe(g15);
unsubscribe(g16);
unsubscribe(g17);
unsubscribe(g18);
unsubscribe(g19);
clear b
function shortF = hex2numS(decimal4) % IEE754の単精度浮動小数点数の形式:binary32
dataBig = strcat(num2str(dec2bin( decimal4(1),8)),num2str(dec2bin( decimal4(2),8)) ...
,num2str(dec2bin( decimal4(3),8)),num2str(dec2bin( decimal4(1),8)));
sign = (-1)^str2num(dataBig(1)); % 符号
exponentBit = dataBig(2:1:9);
fractionBit = ("1" + dataBig(10:1:end));
fraction = bin2dec(fractionBit)/(2^23) ; % 仮数
exponent = 2 ^ (bin2dec(exponentBit) -127) ; % 指数
shortF = sign * fraction * exponent;
end
実行結果です。いろいろと時間調整をしてみましたが、2個目のデータの途中でエラーが出ます。
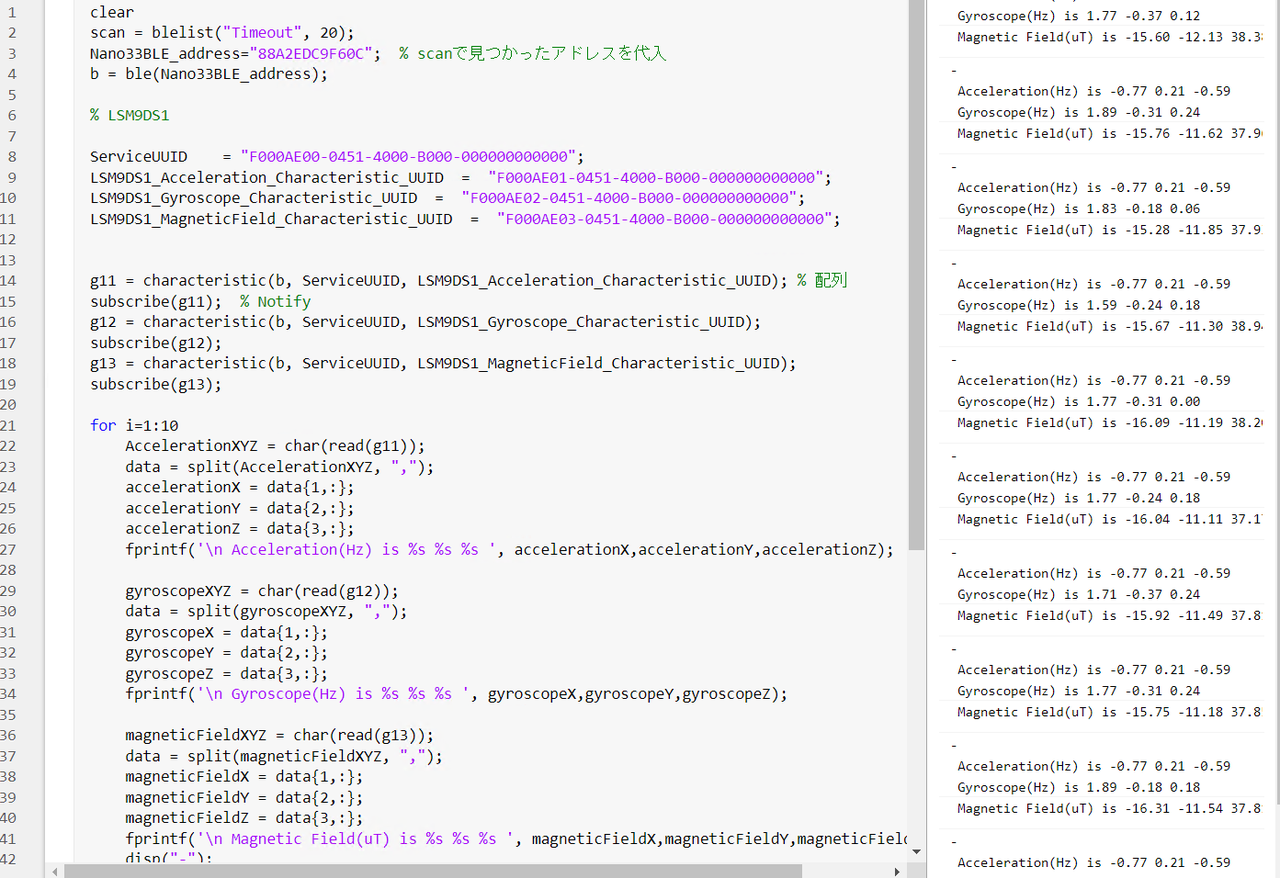
●UUIDは3個の文字列で送ってくる
三つ目のスケッチを動かして、カンマで区切った値を分離します。
clear
scan = blelist("Timeout", 20);
Nano33BLE_address="88A2EDC9F60C"; % scanで見つかったアドレスを代入
b = ble(Nano33BLE_address);
% LSM9DS1
ServiceUUID = "F000AE00-0451-4000-B000-000000000000";
LSM9DS1_Acceleration_Characteristic_UUID = "F000AE01-0451-4000-B000-000000000000";
LSM9DS1_Gyroscope_Characteristic_UUID = "F000AE02-0451-4000-B000-000000000000";
LSM9DS1_MagneticField_Characteristic_UUID = "F000AE03-0451-4000-B000-000000000000";
g11 = characteristic(b, ServiceUUID, LSM9DS1_Acceleration_Characteristic_UUID); % 配列
subscribe(g11); % Notify
g12 = characteristic(b, ServiceUUID, LSM9DS1_Gyroscope_Characteristic_UUID);
subscribe(g12);
g13 = characteristic(b, ServiceUUID, LSM9DS1_MagneticField_Characteristic_UUID);
subscribe(g13);
for i=1:10
AccelerationXYZ = char(read(g11));
data = split(AccelerationXYZ, ",");
accelerationX = data{1,:};
accelerationY = data{2,:};
accelerationZ = data{3,:};
fprintf('\n Acceleration(Hz) is %s %s %s ', accelerationX,accelerationY,accelerationZ);
gyroscopeXYZ = char(read(g12));
data = split(gyroscopeXYZ, ",");
gyroscopeX = data{1,:};
gyroscopeY = data{2,:};
gyroscopeZ = data{3,:};
fprintf('\n Gyroscope(Hz) is %s %s %s ', gyroscopeX,gyroscopeY,gyroscopeZ);
magneticFieldXYZ = char(read(g13));
data = split(magneticFieldXYZ, ",");
magneticFieldX = data{1,:};
magneticFieldY = data{2,:};
magneticFieldZ = data{3,:};
fprintf('\n Magnetic Field(uT) is %s %s %s ', magneticFieldX,magneticFieldY,magneticFieldZ);
disp("-");
pause(2)
end
unsubscribe(g11);
unsubscribe(g12);
unsubscribe(g13);
clear b
function shortF = hex2numS(decimal4) % IEE754の単精度浮動小数点数の形式:binary32
dataBig = strcat(num2str(dec2bin( decimal4(1),8)),num2str(dec2bin( decimal4(2),8)) ...
,num2str(dec2bin( decimal4(3),8)),num2str(dec2bin( decimal4(1),8)));
sign = (-1)^str2num(dataBig(1)); % 符号
exponentBit = dataBig(2:1:9);
fractionBit = ("1" + dataBig(10:1:end));
fraction = bin2dec(fractionBit)/(2^23) ; % 仮数
exponent = 2 ^ (bin2dec(exponentBit) -127) ; % 指数
shortF = sign * fraction * exponent;
end
実行結果です。10回連続してデータを受け取っていますが、問題は生じませんでした。