Nicla Sense MEをデータ入力に使う②クオータニオンのデータをBLEで受け取るセントラル
クオータニオンの出力をするNicla Sense MEのデータを受ける、セントラルをmatlabで作ります。3Dの表示部分はposeplotを使います。
●実数で送ってくる
クオータニオンのデータ、x、y、z、wは実数です。IEEE754 単精度浮動小数点数の形式:binary32を実数に戻します。
実数に戻す処理をテキスト処理で記述した事例です。
function shortF = hex2numS(decimal4) % IEE754の単精度浮動小数点数の形式:binary32
dataBig = strcat(num2str(dec2bin( decimal4(1),8)),num2str(dec2bin( decimal4(2),8)) ...
,num2str(dec2bin( decimal4(3),8)),num2str(dec2bin( decimal4(1),8)));
sign = (-1)^str2num(dataBig(1)); % 符号
exponentBit = dataBig(2:1:9);
fractionBit = ("1" + dataBig(10:1:end));
fraction = bin2dec(fractionBit)/(2^23) ; % 仮数
exponent = 2 ^ (bin2dec(exponentBit) -127) ; % 指数
shortF = sign * fraction * exponent;
end
function Q = read_IMU(f11, f12, f13, f14)
x = hex2numS(flip(read(f11))); % little endian->big endian
y = hex2numS(flip(read(f12)));
z = hex2numS(flip(read(f13)));
w = hex2numS(flip(read(f14)));
Q = [w x y z];
end
数値で処理をしたプログラムです。
function binary32 = IEEE754(fourDigit) % IEEE754の単精度浮動小数点数の形式:binary32
dataBigendian = uint32(bitshift(fourDigit(1), 24) + bitshift(fourDigit(2), 16) + bitshift(fourDigit(3), 8) + fourDigit(4));
sign = power(-1, double(bitget(dataBigendian,32)));
fraction = 1.0 + double(bitshift(uint32(bitshift(uint32(bitshift(dataBigendian,1)) , 8)), -9)) / 8388608.0; % 仮数
exponents = double(2^(double(double(bitshift(bitshift(dataBigendian,1), -24))-127.0))); % 指数
binary32 = sign * fraction * exponents;
%fprintf(" sign %.1f fraction %.4f exponents %.4f ",sign,fraction,exponents);
end
function Q = read_IMU(f11, f12, f13, f14)
x = IEEE754(flip(read(f11))); % little endian->big endian
y = IEEE754(flip(read(f12)));
z = IEEE754(flip(read(f13)));
w = IEEE754(flip(read(f14)));
Q = [w x y z];
end
●メイン・プログラム
クオータニオンの四つのデータを読んできます。順序は、 w、x、y、zです。
rotators = read_IMU(f11, f12, f13, f14);
次のquaternion関数で、a+bi+cj+dkの形式に変換します。
quaternion(rotators)
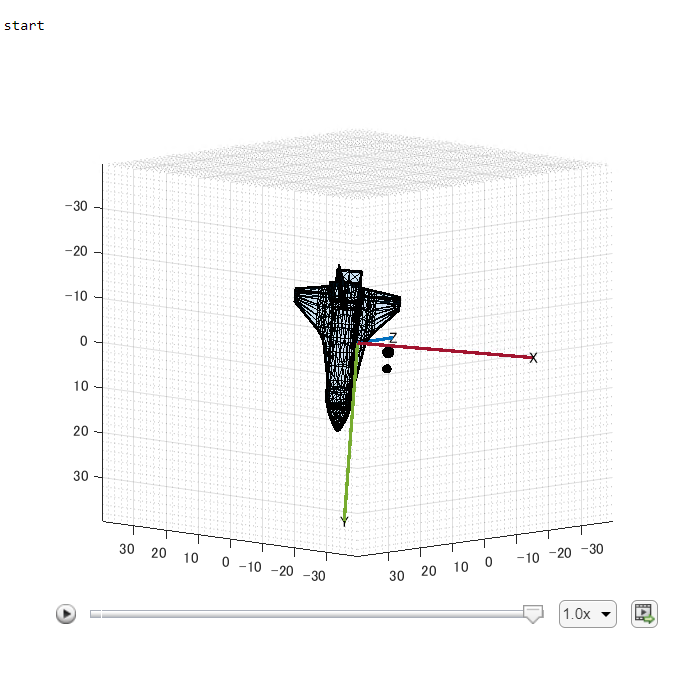
plane3.stlは、Windows10に入っていたスペースシャトルの3Dデータを、Webのあったツールでstlファイル形式に変換しました。
clear
scan = blelist("Timeout", 20);
Nicla_address = "9313D63DDE91"; % scanで見つかったアドレスを代入
b = ble(Nicla_address);
% Nicla_BHI260
ServiceUUID = "F000AA30-0451-4000-B000-000000000000";
BHI260_QuaterX_Characteristic_UUID = "F000AA5A-0451-4000-B000-000000000000";
BHI260_QuaterY_Characteristic_UUID = "F000AA5B-0451-4000-B000-000000000000";
BHI260_QuaterZ_Characteristic_UUID = "F000AA5C-0451-4000-B000-000000000000";
BHI260_QuaterW_Characteristic_UUID = "F000AA5D-0451-4000-B000-000000000000";
f11 = characteristic(b, ServiceUUID, BHI260_QuaterX_Characteristic_UUID);
subscribe(f11); % Notify
f12 = characteristic(b, ServiceUUID, BHI260_QuaterY_Characteristic_UUID);
subscribe(f12);
f13 = characteristic(b, ServiceUUID, BHI260_QuaterZ_Characteristic_UUID);
subscribe(f13);
f14 = characteristic(b, ServiceUUID, BHI260_QuaterW_Characteristic_UUID);
subscribe(f14);
stopTimer = 200;
disp('start');
figure;
tic;
while(toc < stopTimer)
rotators = read_IMU(f11, f12, f13, f14);
poseplot(quaternion(rotators), MeshFileName="plane3.stl",scaleFactor=0.3);
view([50 50 -10]);
end
unsubscribe(f11);
unsubscribe(f12);
unsubscribe(f13);
unsubscribe(f14);
clear b
実行例です。