IMU WT901からUARTでデータ取得①接続
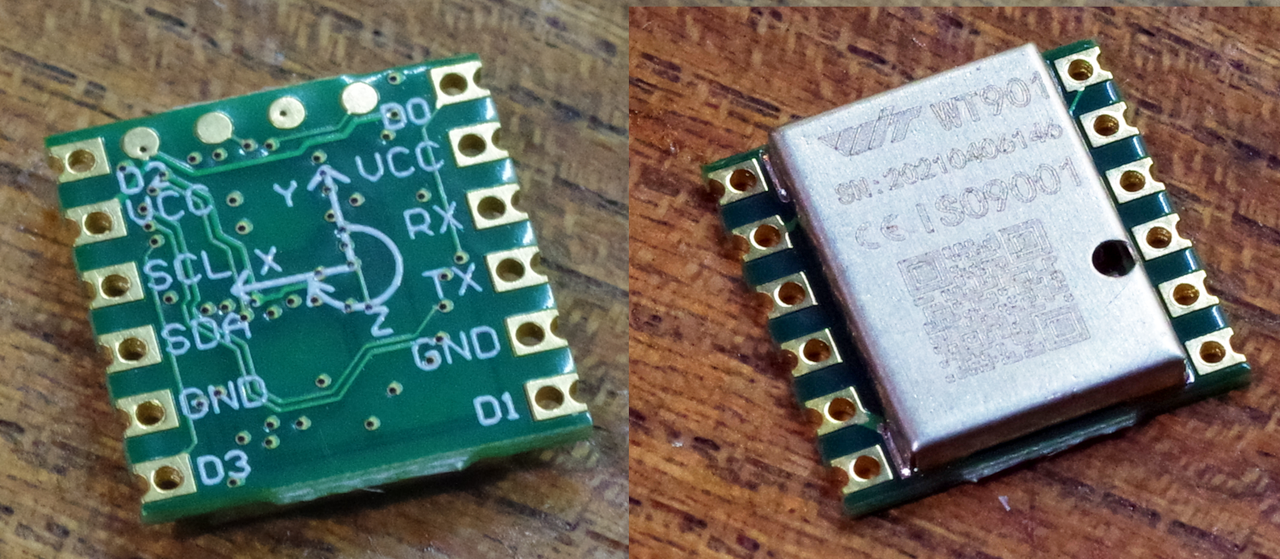
WT901は、IMUのMPU9250とコントローラCortex-M0を搭載したボードです。MPU9250はTDK InvenSenseのGyroscope(ジャイロスコープ)、Accelerometer(加速度)、Magnetometer(磁力)の9軸慣性測定ユニットです。商社マウザーによると製造中止商品になっていますが、市場にはたくさん出回っています。
アマゾンから入手しました。
●WT901おもなスペック
- 動作電圧 3.3〜5V
- 消費電流 25mA以下
- 形状 15.24×15.24×2mm
- パッド間隔:上下100ミル(2.54mm)、約600ミル(15.24mm)
- 測定 加速度:X、Y、Z、角度:X、Y、Z、磁気:X、Y、Z
- 範囲 加速度:±16g、角速度:±2000°/s、磁気:±4900uT
- 分解能(16ビット) 加速度:0.01g、磁気:0.15µT
- 安定性 加速度:0.005g、角速度:0.05°/ s
- 出力レート 0.1~200Hz
- ノイズ 加速度:300μg/√Hz 、0.01°/√Hz
- 測定誤差:0.05°
- シリアル(UART、TTLレベル) 2400〜921600bps。デフォルト9600bps
- I2C 400kHz
●ピン配置
| D0 | アナログ入力、ディジタル入出力、PWM | D2 | アナログ入力、ディジタル入出力、PWM |
| Vcc | 3.3/5V | Vcc | 3.3/5V |
| RX | シリアル入力 | SCL | I2Cクロック |
| Tx | シリアル出力 | SDA | I2Cデータ |
| GND | GND | GND | GND |
| D1 | アナログ入力、ディジタル入出力、PWM | D3 | アナログ入力、ディジタル入出力、PWM |
●USB-シリアル
アマゾンからUSB-シリアル変換ボードを入手しました。
- チップ CP2102
- 電源電圧 5V
- 外形 16×20mm
- サポートするボー レート 300bps~1Mbps
●接続
| USB-シリアル・ボード | WT901ボード |
|---|---|
| +5V | Vcc |
| TxD | Rx |
| RxI | Tx |
| GND | GND |

●サンプル・プログラム
COMポートと通信速度を合わせました。
s=serial('com3','baudrate',9600) ;fopen(s) ;%Open Com Port
実行例です。
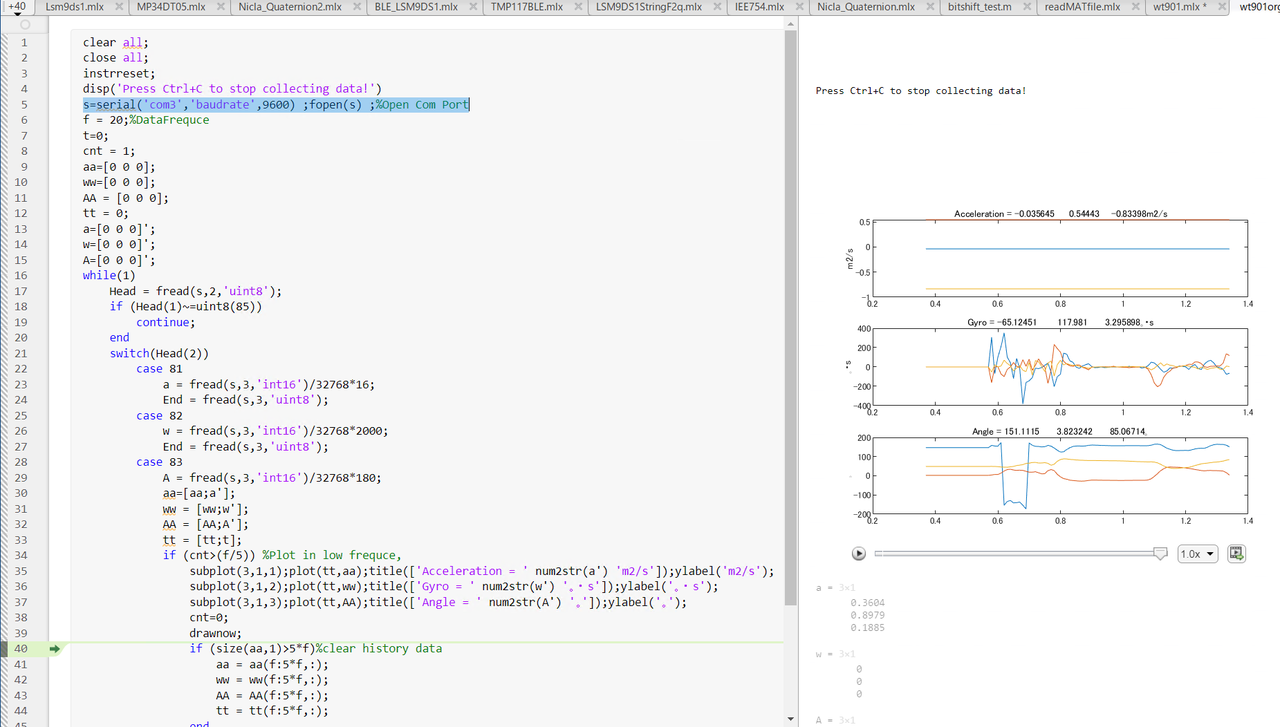
COMポートの記述は、matlab(R2021b)の解説ではserialではなくserialportになっています。変更して動かしましたが、エラーが出ます。
serialportでreadすると、[1,2,3,4,5]のようにデータが取得できますが、 serialは[1;2;3;4;5]のようです。転置して対応しました。また、serialはfopenしてfreadですが、serialportはreadで読み込めます。
clear
close all;
instrreset;
disp('Press Ctrl+C to stop collecting data!')
s = serialport('COM3', 9600);
f = 20;%DataFrequce
t=0;
cnt = 1;
aa=[0 0 0];
ww=[0 0 0];
AA = [0 0 0];
tt = 0;
a=[0 0 0]';
w=[0 0 0]';
A=[0 0 0]';
while(1)
Head = read(s,2,'uint8');
if (Head(1)~=uint8(85))
continue;
end
switch(Head(2))
case 81
a = (read(s,3,'int16')/32768*16)';
End = (read(s,3,'uint8'))';
case 82
w = (read(s,3,'int16')/32768*2000)';
End = (read(s,3,'uint8'))';
case 83
A = (read(s,3,'int16')/32768*180)';
aa=[aa;a'];
ww = [ww;w'];
AA = [AA;A'];
tt = [tt;t];
if (cnt>(f/5)) %Plot in low frequce,
subplot(3,1,1);plot(tt,aa);title(['Acceleration = ' num2str(a') 'm2/s']);ylabel('m2/s');
subplot(3,1,2);plot(tt,ww);title(['Gyro = ' num2str(w') '。・s']);ylabel('。・s');
subplot(3,1,3);plot(tt,AA);title(['Angle = ' num2str(A') '。']);ylabel('。');
cnt=0;
drawnow;
if (size(aa,1)>5*f)%clear history data
aa = aa(f:5*f,:);
ww = ww(f:5*f,:);
AA = AA(f:5*f,:);
tt = tt(f:5*f,:);
end
end
cnt=cnt+1;
t=t+0.01;
End = (read(s,3,'uint8'))';
end
end