Simulink Support Package for Raspberry Pi ④ I2C VL53L0XとGPIO
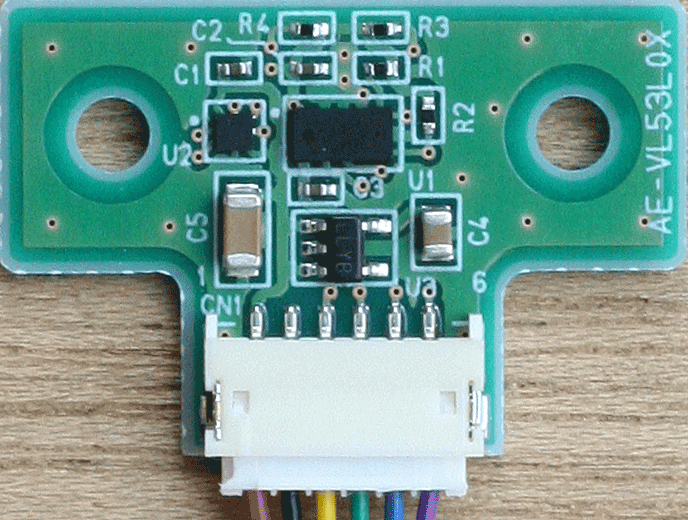
ラズパイのI2Cバスにつなげて使う距離センサVL53L0Xを使います。最大約2mまでを計測できます。
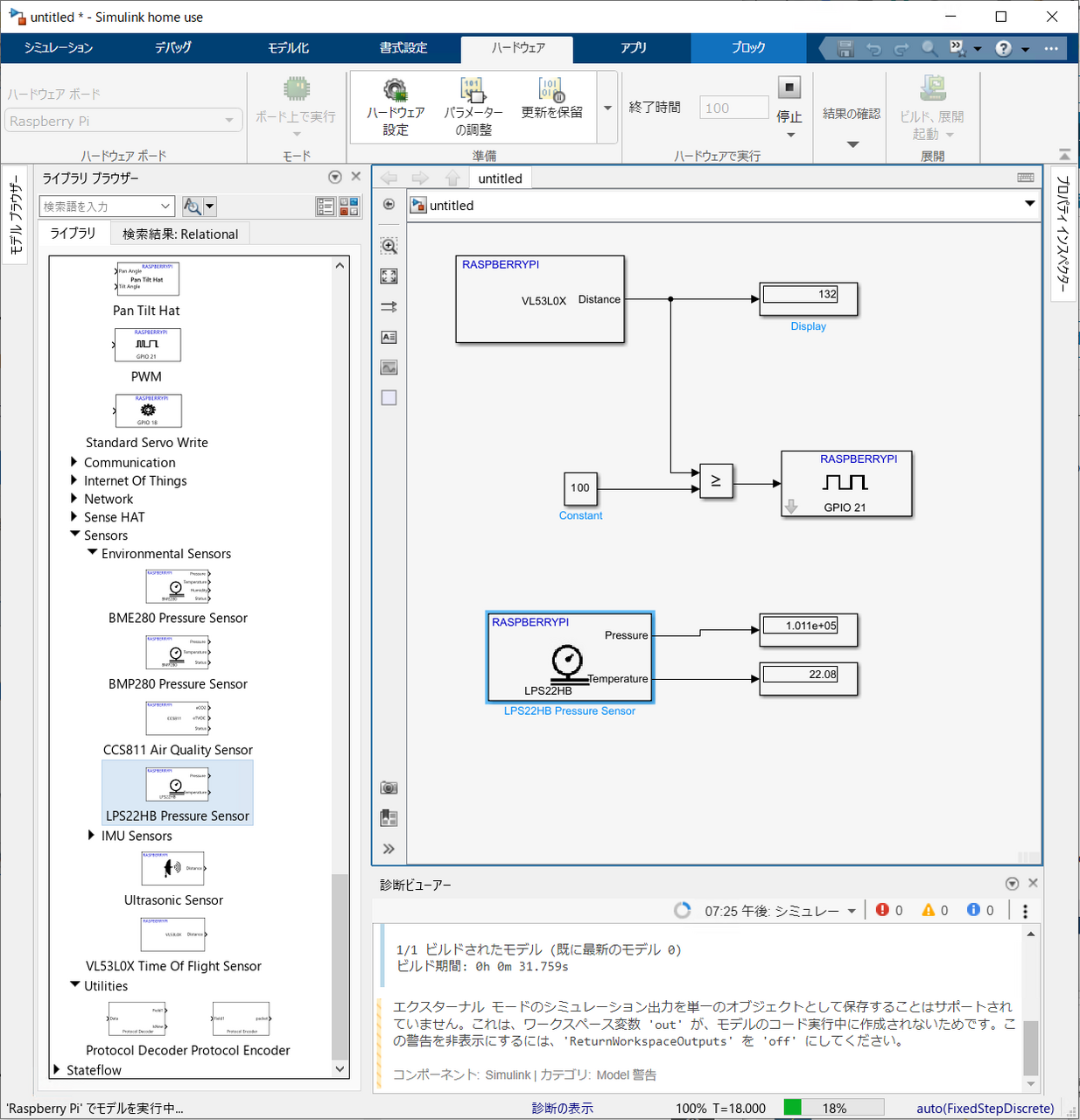
●ブロック
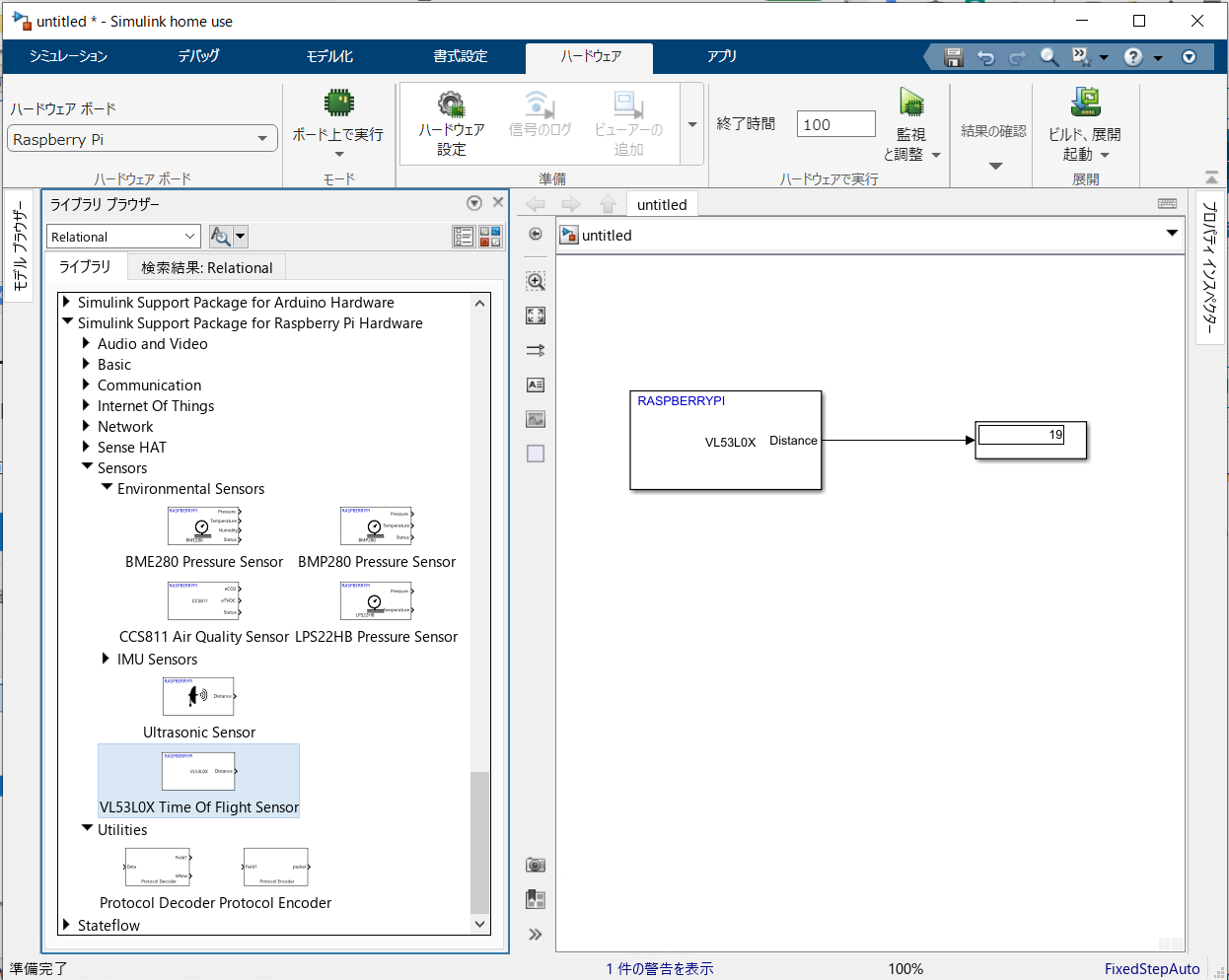
Simulink Support Package for Raspberry Piのブロックの中から、VL53L0X Time of Flight Sensorブロックを選択します。
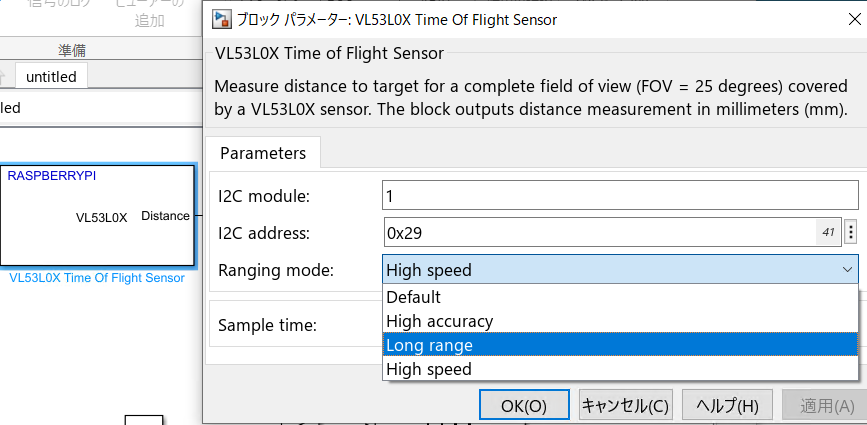
VL53L0XブロックのパラメータはHight speedを選択しました。
ライブラリブラウザの一番上のSimulinkのSinksからDisplayをドラッグします。出力Distanceとつなぎます。表示されるのは、mmの整数値です。
100mm以上になると、GPIO21(39番)につないだLEDが点灯するようにしました。LEDをつないでいるのはGPIO writeブロックです。
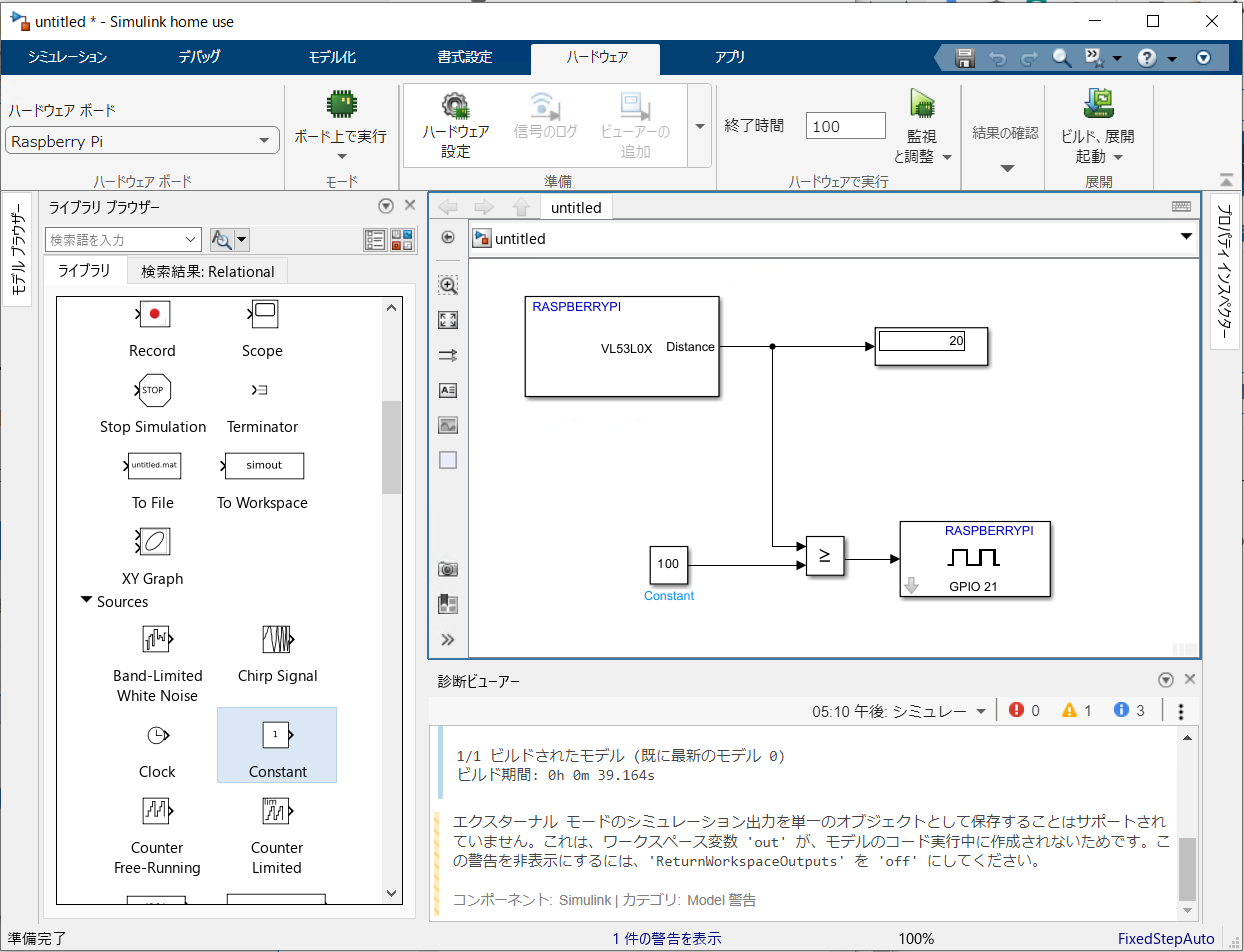
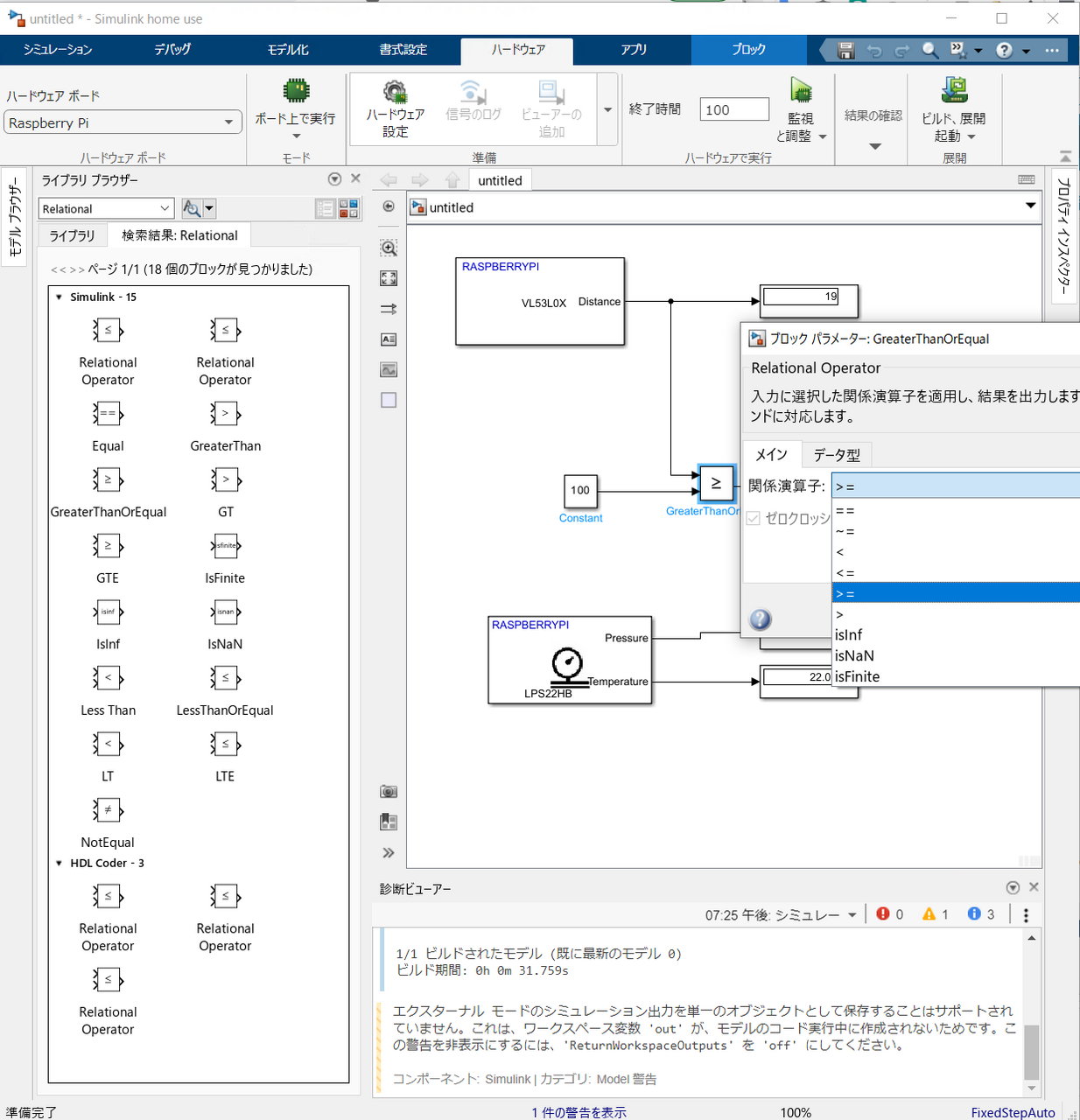
比較するために、Relational Operatorブロックを用意します。VL53L0Xブロックの出力Distanceと比較する100はConstantブロックです。
距離計のデータの更新は1秒弱と速くありません。
●複数のI2Cデバイス
前回使った気圧センサLPS22HBはつないだままです。
| LPS22HB | ラズパイ4 | VL53L0X |
|---|---|---|
| 赤色 | 3.3V | 赤色 |
| 黒色 | GND | 黒色 |
| SCL | 5番 | SCL |
| SDA | 3番 | SDA |
スレーブ・アドレスが異なっているので、問題なく二つのセンサが同時に動作しました。