CircuitPython 10行プログラミング Step2 (7) サーボ・モータ①
二足走行ロボットが電子工作の分野で登場するまで、サーボ・モータには2種類の製品がありました。一つは製造業などの機器で使われていたACサーボ・モータです。もう一つは、ラジコン用のサーボ・モータです。飛行機のラダーなどを動かすために使われていました。軽量なのが特徴です。

二足走行ロボットが登場した直後はそれまでのラジコン用のサーボ・モータが流用されていましたが、トルクを上げたり、コマンドをシリアル通信で行うような改良が行われました。ラジコン用もディジタル通信が採用されるようになり、各社独自の規格をアピールしています。
●Arduinoなどで使われるサーボ・モータは3線式
古くから使われているラジコン用サーボ・モータは、3本のケーブルで接続します。最近よく見るのは下記の色です。
| ケーブルの色 | 信号 |
|---|---|
| 茶色 | GND |
| オレンジに近い赤色 | V+ |
| オレンジに近い黄色 | 信号(PWM) |
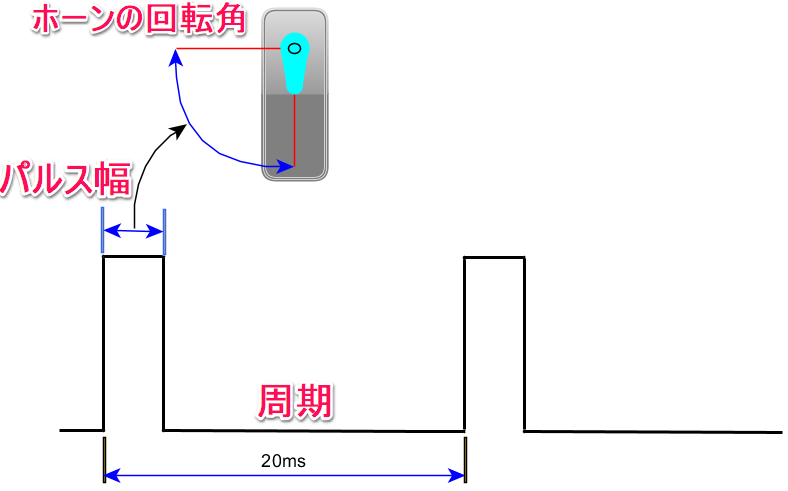
信号のPWMは次の波形をしています。周期は約20ms、HIGHの時間によって、回転する角度が決まりますが、製品によって統一されていなく、ほぼ1500us付近が中央値の値が多いようです。
回転角度は120~160°が多く、360°に対応した製品もあります。
電源電圧はカタログに書かれていないことが多いのですが、4.8~6Vが多いようです。
モータの回転は内部のギアで減速されます。外に出ている軸にホーンを挿しこみます。ホーンにはピアノ線をひっかける穴が複数開いています。ピアノ線が動くと、その先についている方向舵(ラダー)やエルロンを動かし、飛んでいく方向などを変えられます。
●接続
| サーボ・モータ | マイコン・ポード Grand Central |
|---|---|
| 茶色 | GND |
| オレンジに近い赤色 | 5V |
| オレンジに近い黄色 | A2 |
●プログラム
こちらの解説ページにあるCircuitPython_Servo.pyをMuエディタに貼り付け、main.pyで保存し、実行します。
import time
import board
import pulseio
from adafruit_motor import servo
# create a PWMOut object on Pin A2.
pwm = pulseio.PWMOut(board.A2, duty_cycle=2 ** 15, frequency=50)
# Create a servo object, my_servo.
my_servo = servo.Servo(pwm)
while True:
for angle in range(0, 180, 5): # 0 - 180 degrees, 5 degrees at a time.
my_servo.angle = angle
time.sleep(0.05)
for angle in range(180, 0, -5): # 180 - 0 degrees, 5 degrees at a time.
my_servo.angle = angle
time.sleep(0.05)
while文以下を my_servo.angle = 90 に変更して保存します。このときの波形をPicoScopeで観測します。
サーボ・ホーンは一度動いて静止しますが、波形は一度パルスを出した以後、観測できません。
| while True: my_servo.angle = 90 time.sleep(1) |
上記のようにangleを繰り返すように修正すると、上記と同じくサーボ・ホーンは一度動いて静止し、継続して次の波形になります。
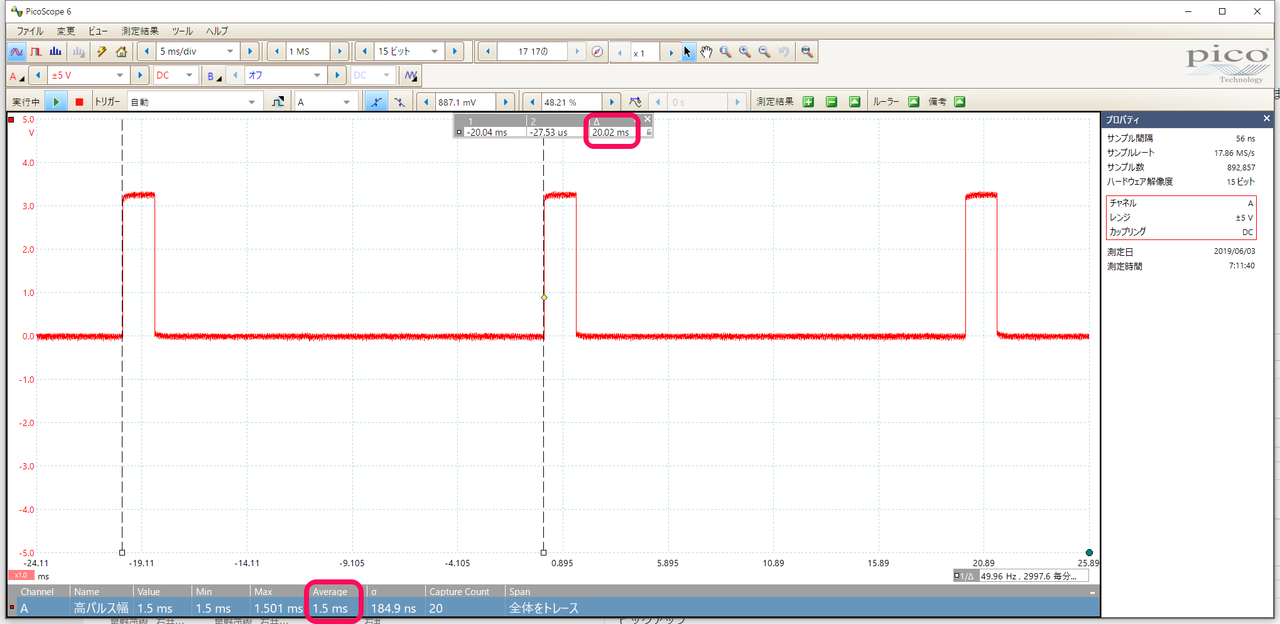
周期は20.02ms、パルス幅は1500usです。
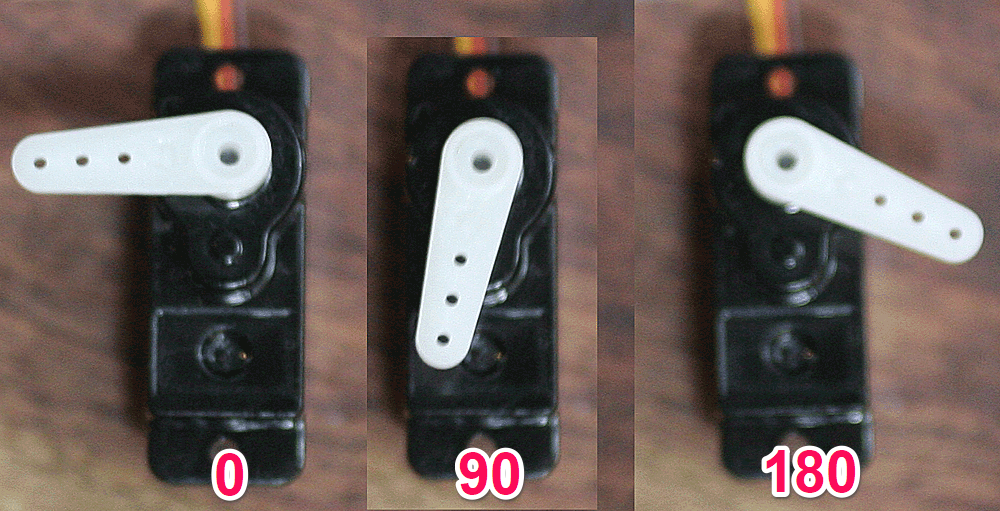
my_servo.angle = 180にするとパルス幅は2251us、0にすると750usになりました。ホーンの回転は次のようになりました。
●パルスの出る条件
| my_servo.angle = 90 |
では、一度パルスが出るだけです。
| my_servo.angle = 90 time.sleep(1) my_servo.angle = 120 |
最初のパルスは1秒間連続して出ていて、120のパルスは一度だけ出て、あとはなくなります。
| my_servo.angle = 120 time.sleep(5) my_servo.angle = 0 time.sleep(5) |
120のパルスが5秒、0のパルスが5秒出て、止まります。したがって、一度パルスを出せばホーンは指定の角度分回るが、パルスの出力は停止する。sleepさせると、その間同じパルスを出し続けるということがわかりました。
●2個のサーボ・モータをつなげる
上記の実験はサーボ・モータの信号線をA2につなぎました。もう一つのサーボ・モータの信号線をA3につなぎ、次のプログラムを動かします。
A3ポートはだめだと言われたので、D14につなぎ直しました。
import time
import board
import pulseio
from adafruit_motor import servo
# create a PWMOut object on Pin A2.
pwm0 = pulseio.PWMOut(board.A2, duty_cycle=2 ** 15, frequency=50)
pwm1 = pulseio.PWMOut(board.D14, duty_cycle=2 ** 15, frequency=50)
# Create a servo object, my_servo.
my_servo0 = servo.Servo(pwm0)
my_servo1 = servo.Servo(pwm1)
while True:
my_servo0.angle = 180
time.sleep(1)
my_servo1.angle = 180
print("ok")
my_servo0.angle = 10
time.sleep(1)
my_servo1.angle = 80
print("ok")
三つ目をD15につなぎました。
import time
import board
import pulseio
from adafruit_motor import servo
# create a PWMOut object on Pin A2.
pwm0 = pulseio.PWMOut(board.A2, duty_cycle=2 ** 15, frequency=50)
pwm1 = pulseio.PWMOut(board.D14, duty_cycle=2 ** 15, frequency=50)
pwm2 = pulseio.PWMOut(board.D15, duty_cycle=2 ** 15, frequency=50)
# Create a servo object, my_servo.
my_servo0 = servo.Servo(pwm0)
my_servo1 = servo.Servo(pwm1)
my_servo2 = servo.Servo(pwm2)
while True:
my_servo0.angle = 180
time.sleep(1)
my_servo1.angle = 180
my_servo2.angle = 180
print("ok")
my_servo0.angle = 10
time.sleep(1)
my_servo1.angle = 80
my_servo2.angle = 80
print("ok2")
問題なく動作しました。
●たくさんのサーボ・モータをつなぐ
このマイコン・ボードGrand CentralでPWM出力に使えるのは、下記のピンです。したがって、サーボ・モータは同時にたくさんつなげられますが、配線が煩雑になります。
- A1、A2、A12、A15
- D2~D9、D11、D13~D45、D48、D50~D53
- MISO、MOSI、SCK、SCL、SDA
ContinuousServoは連続的にパルスを出し続けてくれる関数かと思いましたが、配給電力?を制御する関数のようです。throttleは-1~1の範囲で指定します。
| my_servo1 = servo.ContinuousServo(pwm1)
my_servo1.throttle = 0.8 |