
2025年夏、ラズパイ5で利用しているRaspberry Pi OS (64-bit)は、 Debian12(コードネームbookworm) をベースに作られています。2023年10月10日にリリース
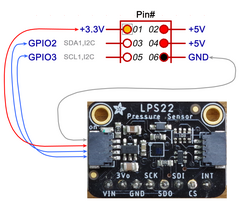
ラズパイ5のI2Cバスに接続した気圧センサLPS22HBをPythonでアクセスします。 ラズパイ2023年10月更新 bookworm ② pythonでI2Cバスをアクセス 上の記事をトレースし、
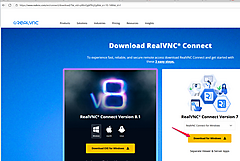
VNCを利用します。 ●環境 Windows11;24H2 コマンドプロンプト sshでアクセス Raspberry Pi 5 4GBモデル OS Raspberry Pi OS (64ビット)、bo
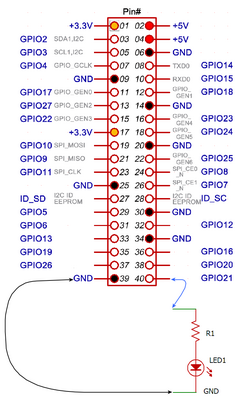
GPIOを利用します。利用できるPythonのライブラリはgpiozeroだけと思われます。 ●環境 Windows11;24H2 コマンドプロンプト sshでアクセス Raspberry Pi 5
2023年1月に、ラズパイ5に新しいOSをインストールしました。 ラズパイ2023年10月更新 bookworm ① OSの情報 2025年夏、OSのバージョンは変化していませんが、この2年の間に変わ
この連載で使っているモータ・コントローラBLVD-KRDは、次の三つのモードをサポートしています(最新のバージョンではProfile Torque Mode (tq)をサポート)。 プロファイル位置モ
前回のプログラムcanppm.pyの一部をを関数化、整理しました。プログラム名はcanppm2.pyです。位置決め部分をmove()という関数にしたので、mainのプログラムが見通しが良くなりました。
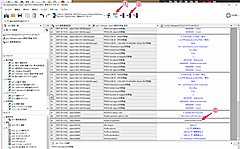
前回、Profile Position Modeの設定項目(オブジェクト)のパラメタを読み出しました。 たくさんの項目があるので、どういう手順で設定すべきか迷います。前回紹介した二つの設定手順を具体的
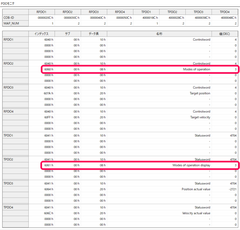
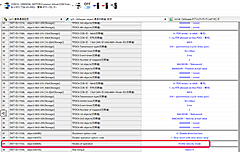
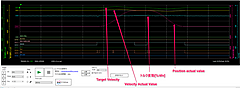
前回、Homing modeを設定し、pythonの原点復帰プログラムを動かしました。 現在、設定されている運転モード(Modes of operation)を確認します。MEXE02の「(m12)

CANopenで、BLDCモータやステッピング・モータを回す規格がCiA 402です。この基本的な CiA 301 仕様の上に用意された規格によって、位置決め制御などができるようになります。「CiA