TB6605FTG Brushless Motor Kit for Arduinoをラズパイで利用する(4)
いろいろなモータのカタログを見ると、XXrpm/Vという表現が見つかります。今までの実験では約13Vの実験用電源をつないでいました。最初に、モータの電源電圧を変化させて回転数を測ります。モータ42BLF01のデータシートには、24Vdcで4000±300rpmと書かれています。
回転数は、ディジタル・タコメータDT2234Bで測りました。
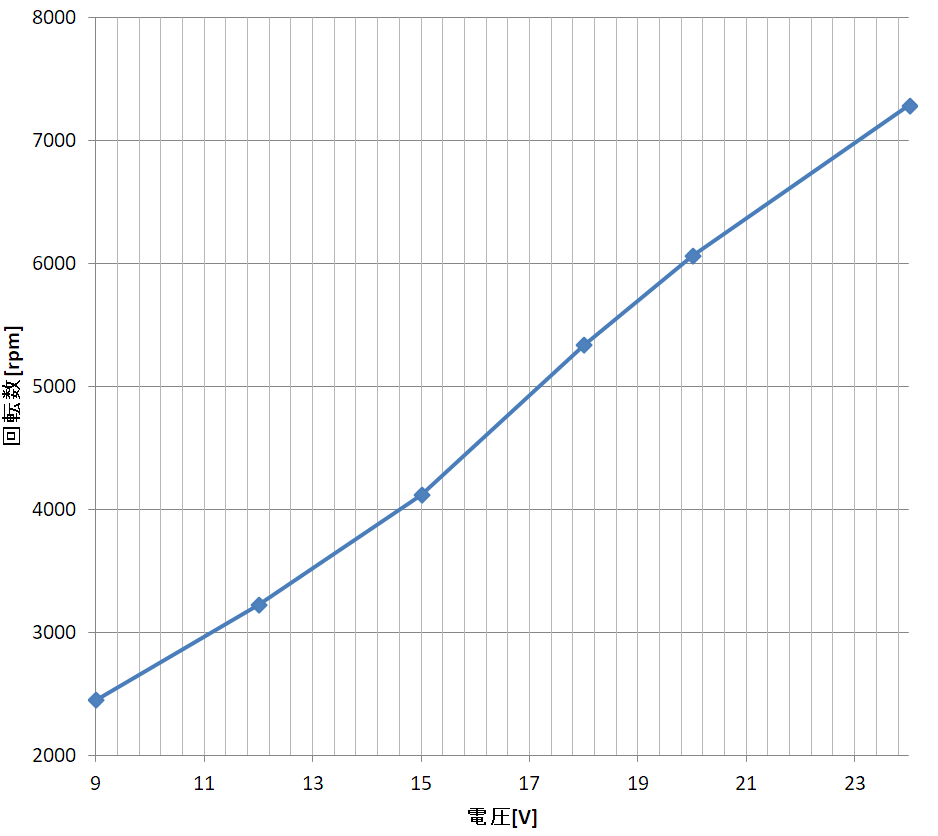
●モータの電圧と回転数
10kHz、デューティ50%の発振周波数をPWM_INに入力します。電圧は9Vから24Vへ変化させました。
| 電圧 [V] | 回転数 [rpm] |
|---|---|
| 9 | 2448 |
| 12 | 3223 |
| 15 | 4112 |
| 18 | 5336 |
| 20 | 6056 |
| 24 | 7282 |
電圧と回転数は比例関係にあることがわかりました。
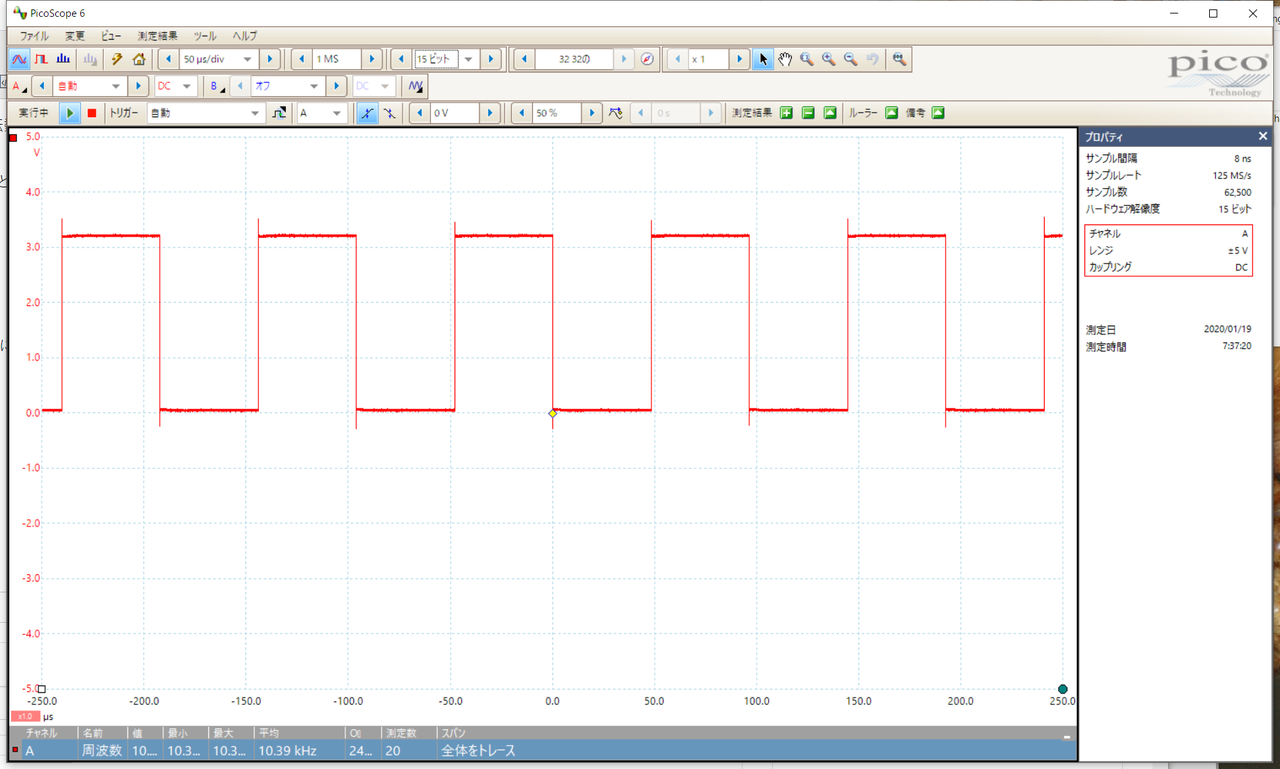
●発振器でデューティを変える
PWM_IN信号の周波数を変化させてもモータの回転数は変わりませんでした。そのとき、PWM信号はデューティ50%でした。ここでは、デューティ比を変化させて、何が変わるかを観測します。
次の図は、デューティ比が約20%のときの波形です。
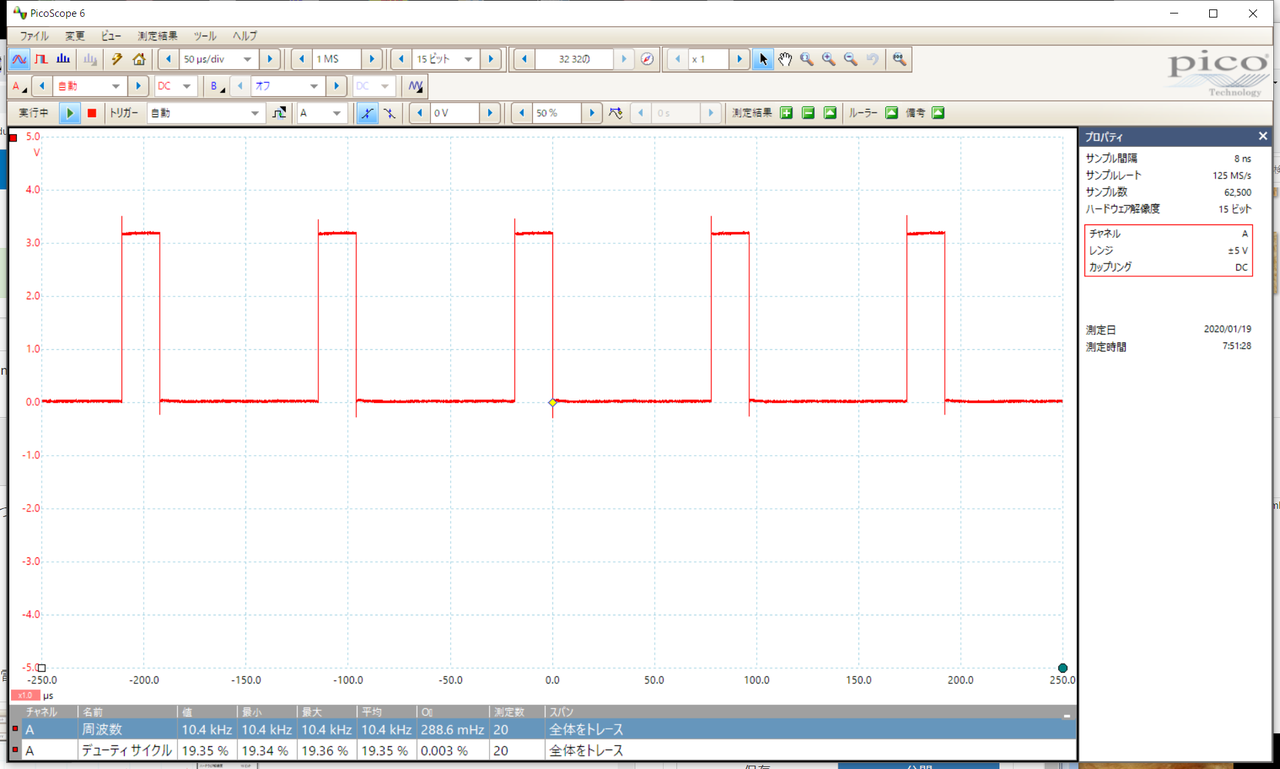
モータの電源電圧は12Vです。
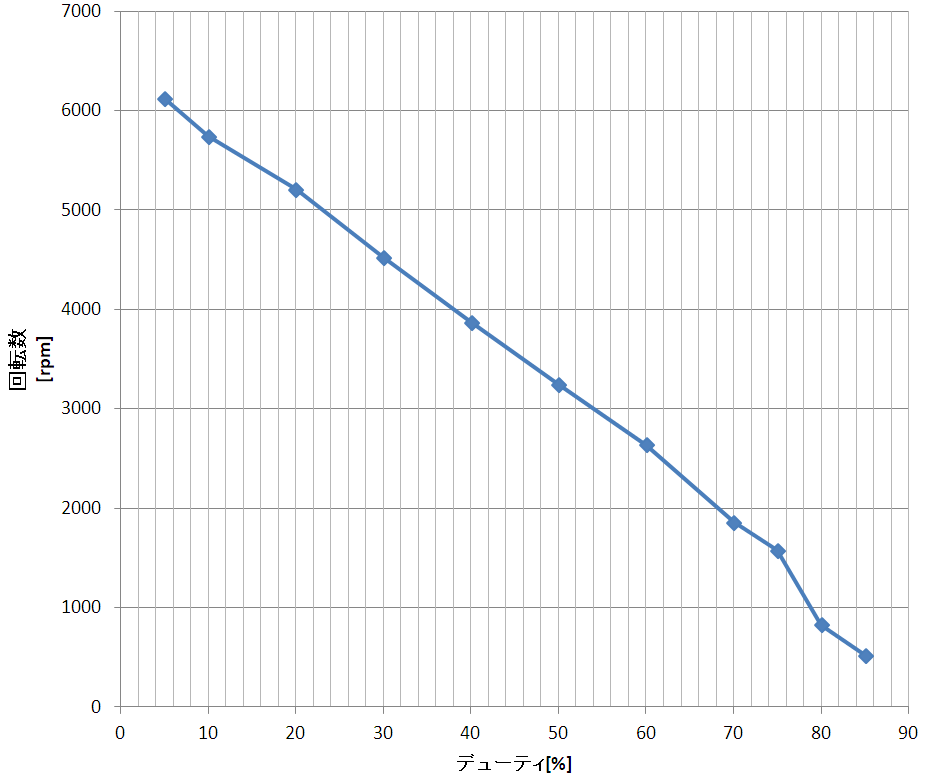
| デューティ[%] | 回転数[rpm] |
|---|---|
| 85 | 520 |
| 80 | 829 |
| 75 | 1574 |
| 70 | 1860 |
| 60 | 2639 |
| 50 | 3248 |
| 40 | 3874 |
| 30 | 4528 |
| 20 | 5210 |
| 10 | 5744 |
| 5 | 6123 |
デューティ比と回転数は、比例関係にあることがわかりました。