TB6605FTG Brushless Motor Kit for Arduinoをラズパイで利用する(2)
前回、TB6605FTG Brushless Motor Kit for Arduinoをラズパイと共に使ってブラシレスDCモータを回転させました。ラズパイでは96kHzのPWM信号を作るだけで、Start/Stopはボード上のスイッチを利用しました。したがって、ラズパイを使うまでもないので、PWM信号は発振器を利用します。PWM信号はデューティ50%の方形波です。
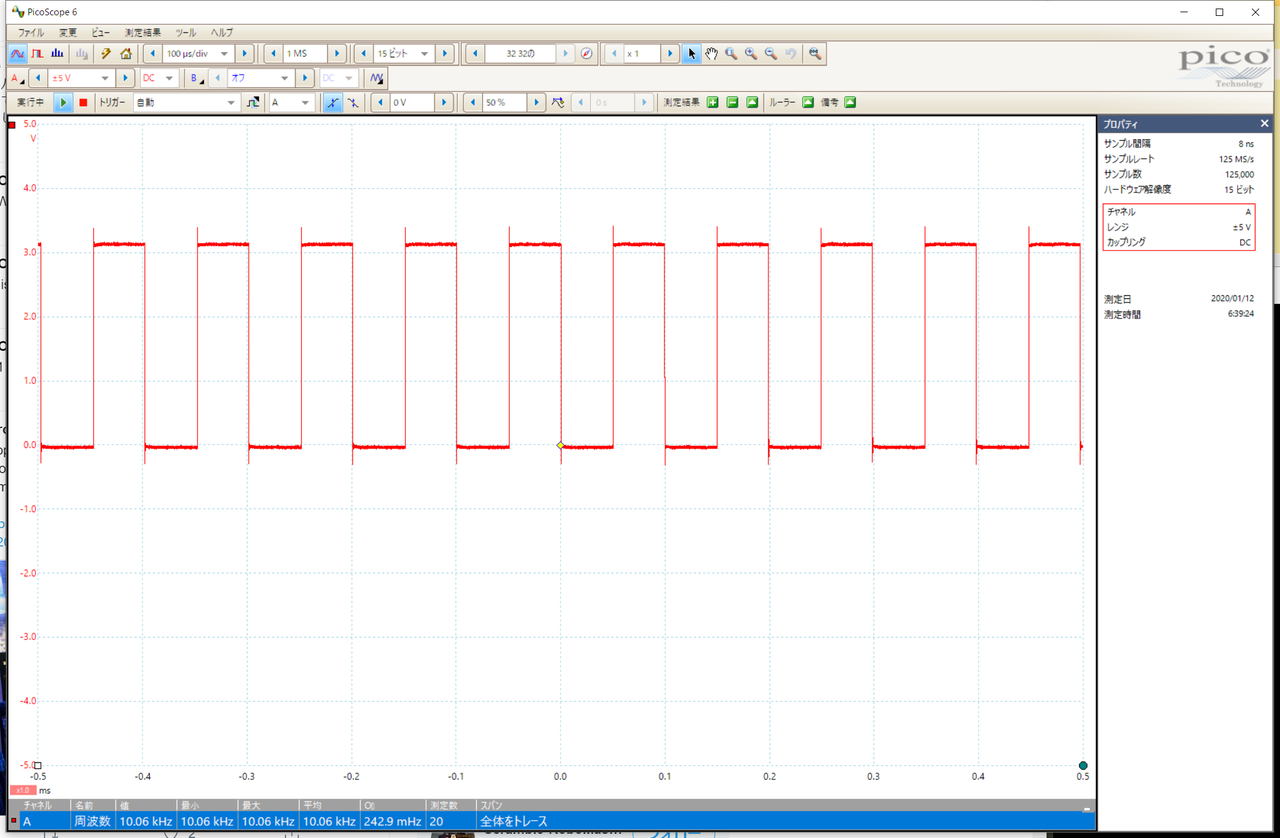
●10kHzの方形波
TB6605FTGのPWM_INの入力周波数は10k~100kHzです。発振器(岩通FG-350)を使って、一番低い10kHzの方形波を作ります。電圧は0~約3.3Vです。
ボードに電源をつなぎStartさせると、モータは回転を始めました。このPWM_IN信号(赤色)とホール素子のHA信号のロジック・レベル出力HP(青色)を観測します。
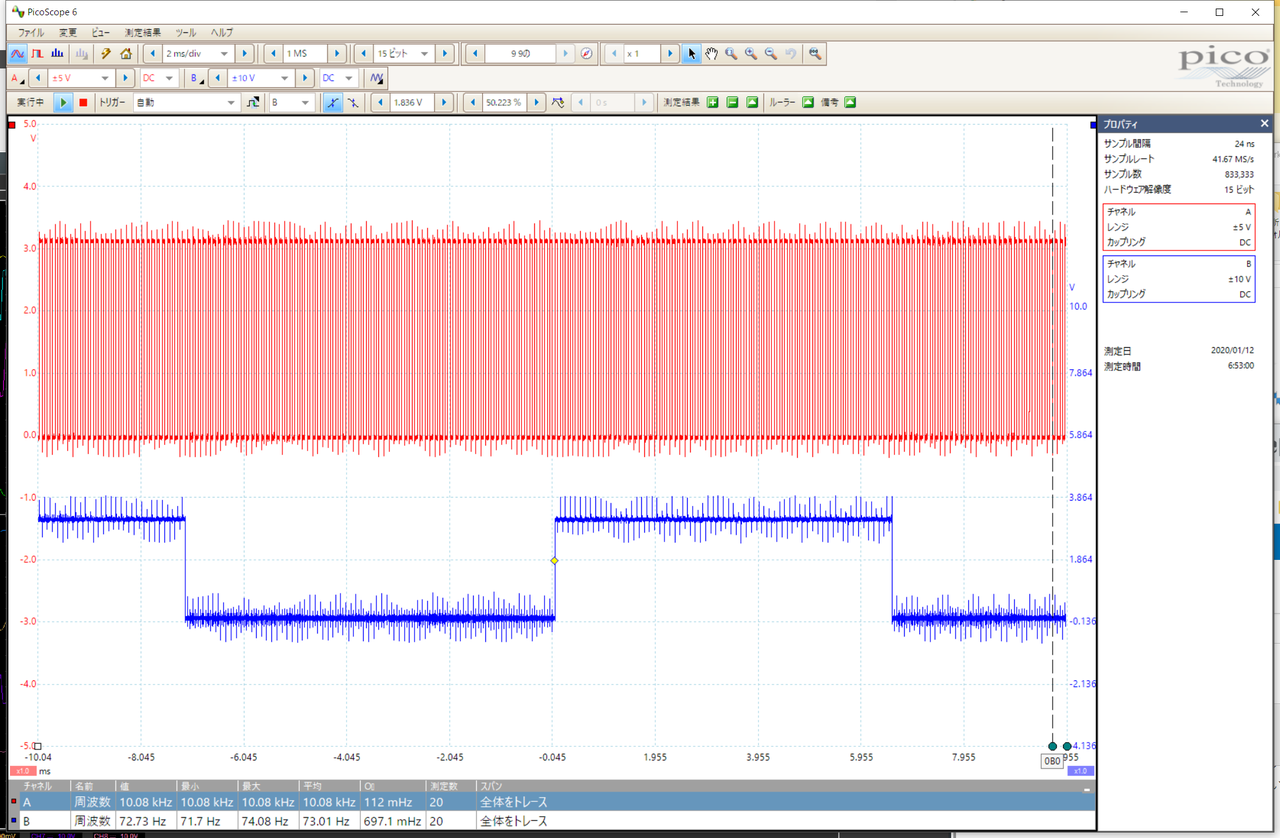
PWM_IN信号(赤色)が10kHzで、HP(青色)は74Hzです。1分に換算するために60を掛けると4440rpmになります。
オシロスコープはPicoScope 5242Bです。
●U、V、Wの信号
ブラシレスDCモータは三つの巻き線があります。それぞれの巻き線に電流をずらして流して回転させます。通常、巻き線をU、V、Wという名称で呼びます。この巻き線の電流をUR_Dの電流センサHCS10-50APCLSで同時に観測します。
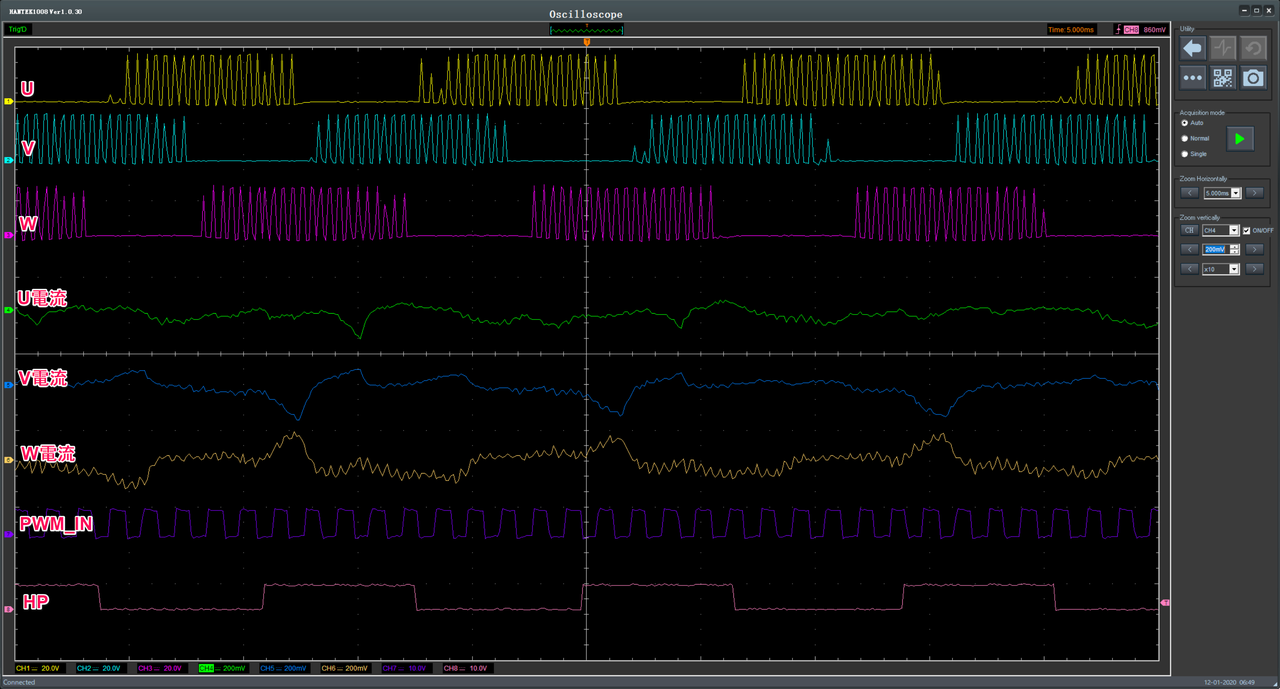
オシロスコープはHantek 1008Cです。周波数特性はとても悪いので、CH1、CH2、CH3のU、V、Wの電圧波形の一部が三角波に見えていますが、実際は方形波です。
U、V、Wの信号の関係は、TB6605FTGのデータシートの「正弦波 PWM 駆動の動作波形」の項目に書かれている波形と一致します。