距離を正確に測る その5 LIDAR-Lite v3HP
LIDAR-Lite(v3HP)は、レーザー(CLASS 1)を用いた距離センサです。測定範囲は5cm~40mと広範囲で、解像度は1cmです。防水はApple Watchと同じIPX7なので、短時間であれば雨に当たる環境でも動作します。LIDAR-Lite v3という少し古いモデルも併売されています。
●LIDAR-Liteのおもなスペック
- 動作電圧;4.5~5.5V
- 外形;34×55×40 mm(実測)
- 計測範囲;5cm~40m
- 解像度;1cm
- 確度;2m以上の距離で±2.5cm
- 消費電流;測定時85mA未満
- 通信;I2C(400kbps、アドレス0x62)、PWM
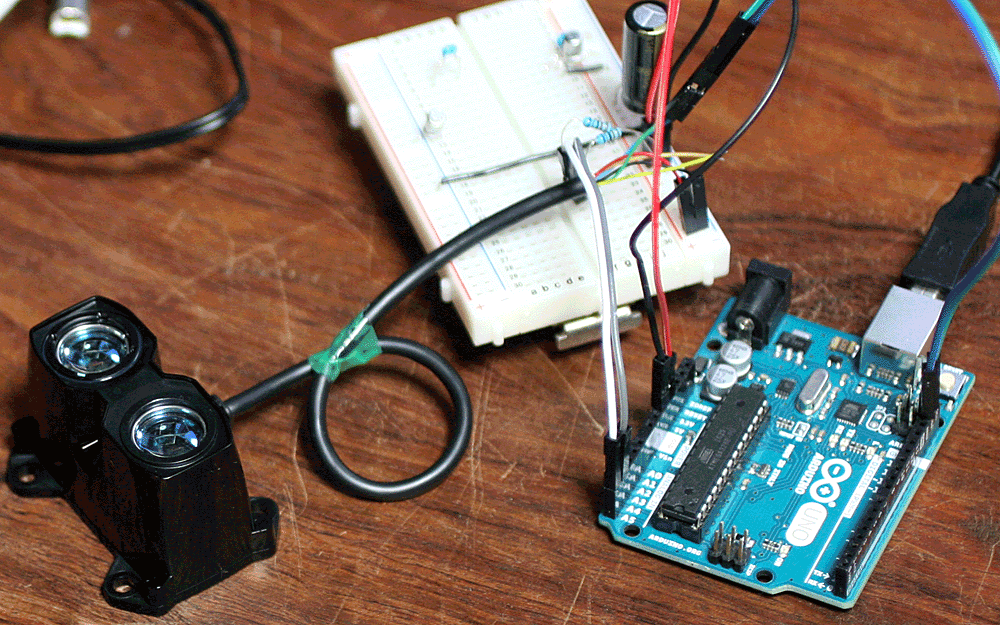
●接続
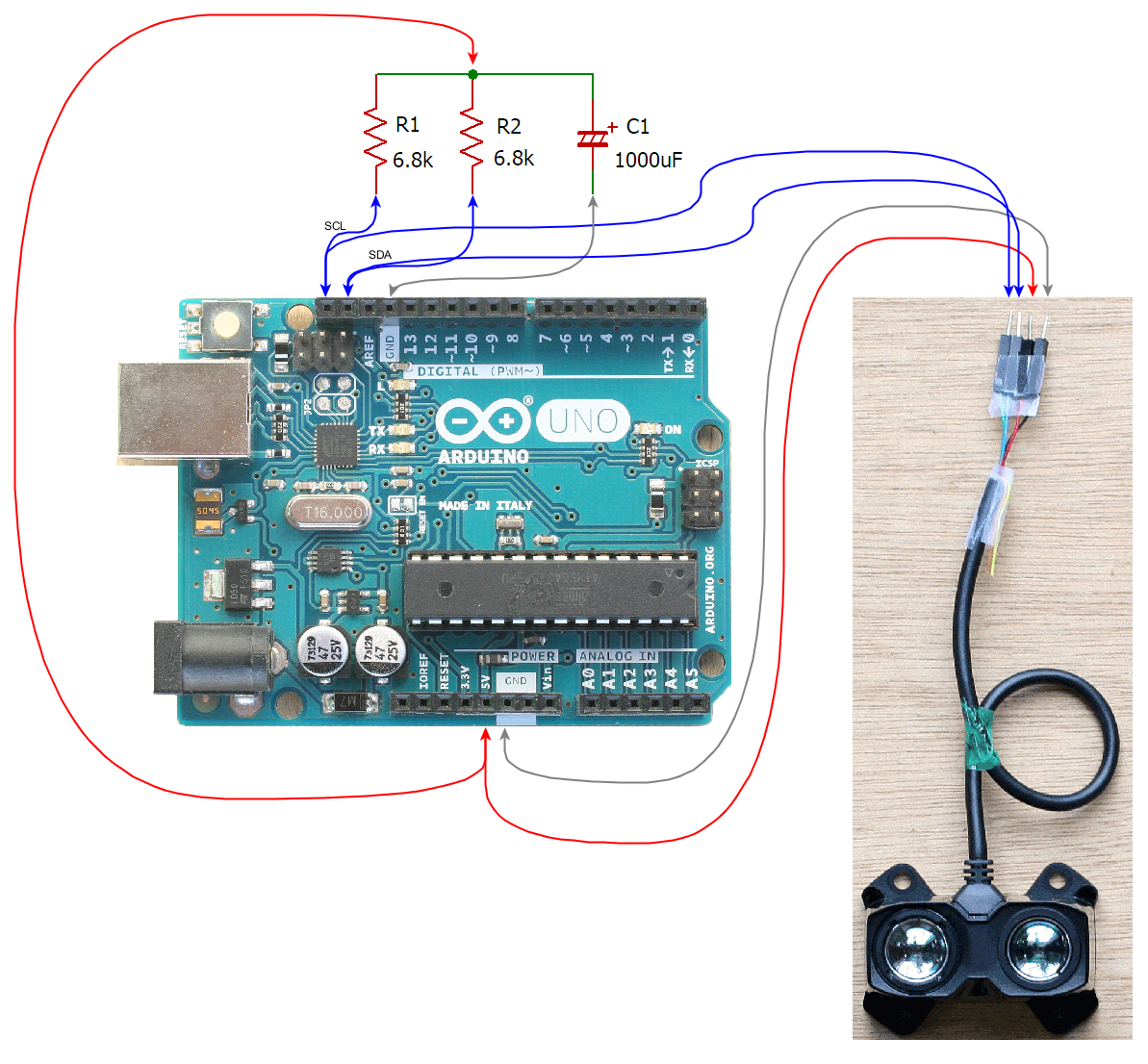
センサ本体から6本のリード線が出ています。電源ラインに680uFの電解コンデンサを入れるようにマニュアルに書かれているので、電源を入れた直後の突入電流が大きいかもしれません。
| ケーブルの色 | 機能 |
|---|---|
| 赤 | 5V |
| オレンジ | パワー・イネーブル |
| 黄 | モード・コントロール |
| 緑 | SCL |
| 青 | SDA |
| 黒 | GND |
接続図です。4.7k~10kΩの抵抗を使ってI2Cの信号SDAとSCLを5Vへプルアップします。電源に入れる電解コンデンサは大きめの1000uFを入れました。I2Cインターフェースでは不要なオレンジと黄色のケーブルは配線していません。
●ライブラリの導入
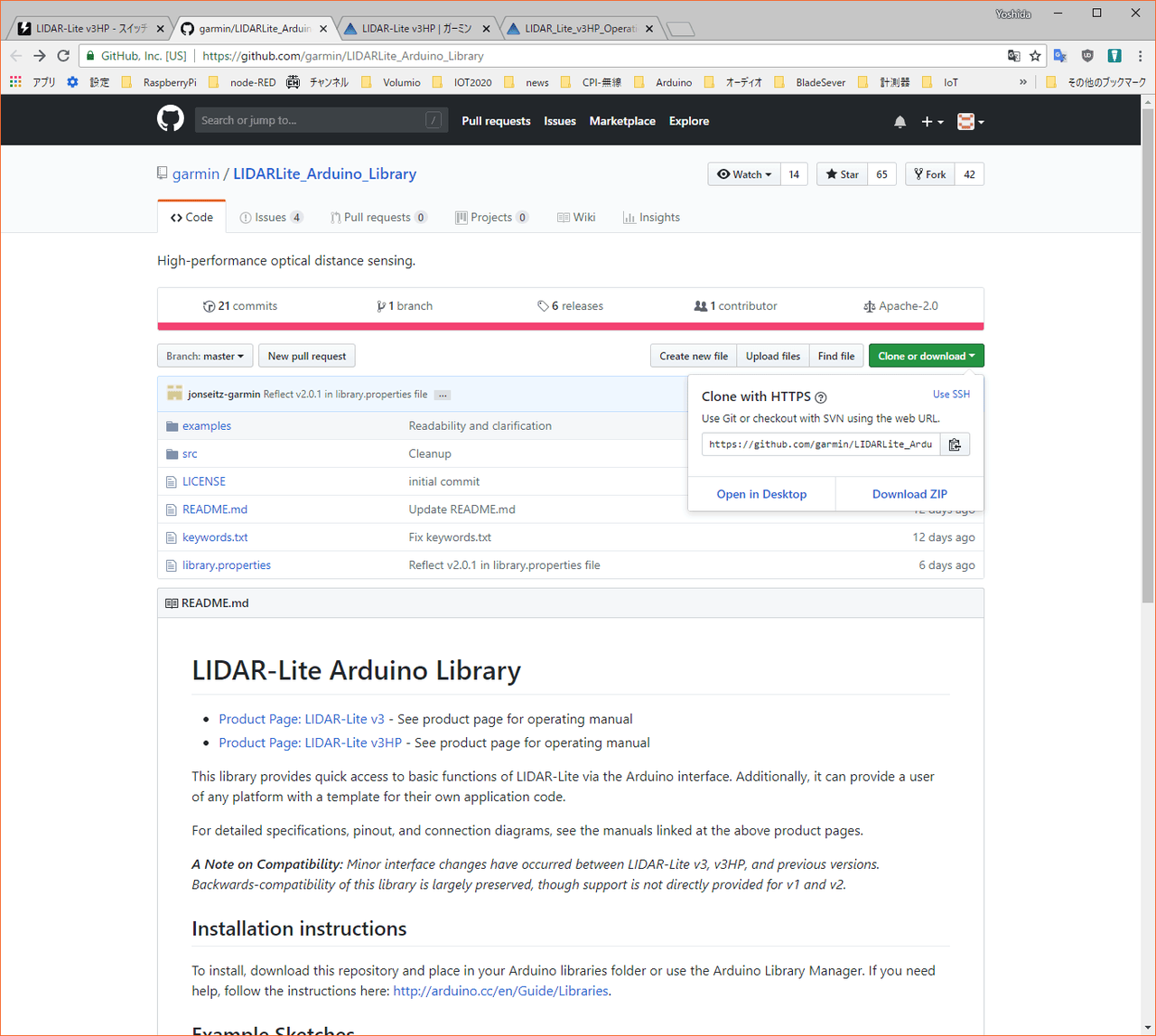
GitHubのgarmin/LIDARLite_Arduino_Libraryをアクセスし、zipファイルをダウンロードします。2018年7月現在、LIDAR-Lite v3HPに対応して一度アップデートした2.0.1がダウンロードできます。
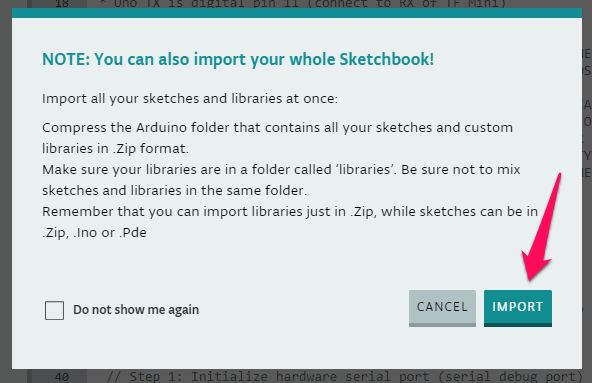
Web EditorのLibrariesからCustomのタブにあるupload...をクリックします。
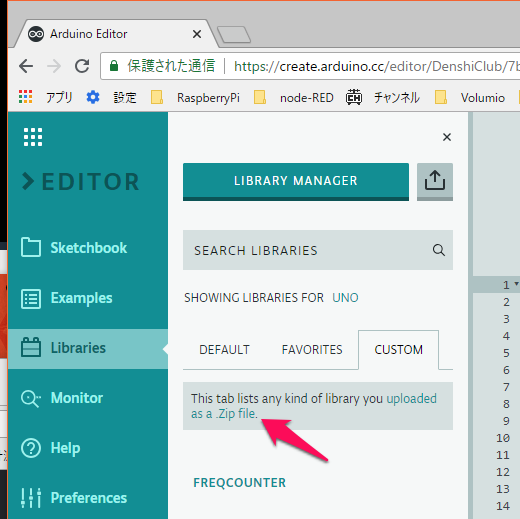
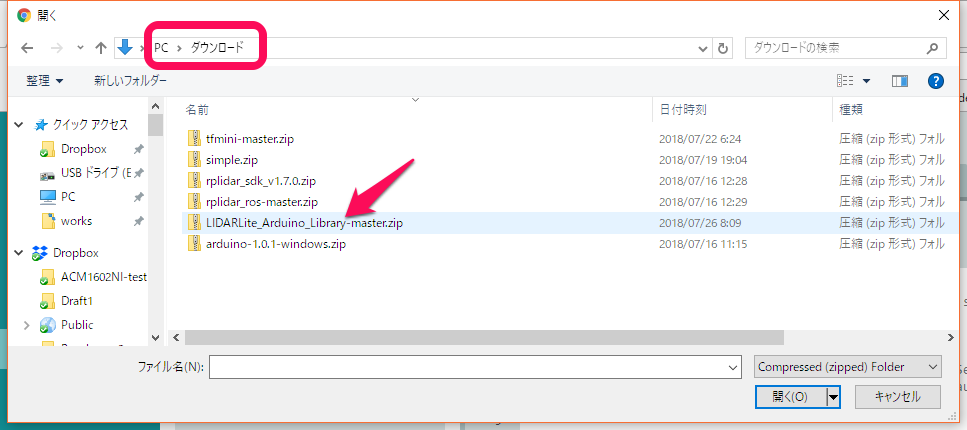
ダウンロード・フォルダにあるLIDARLite_Arduino_Library-master.zipを指定して読み込みます。
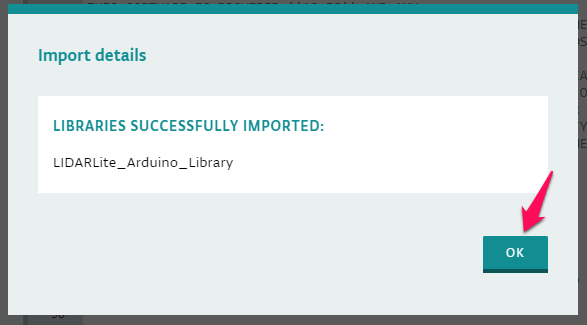
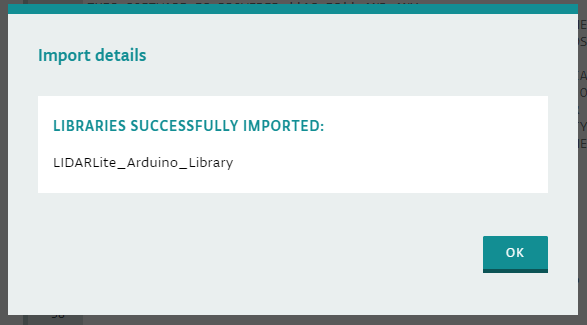
読み込みました。
{kind=link}
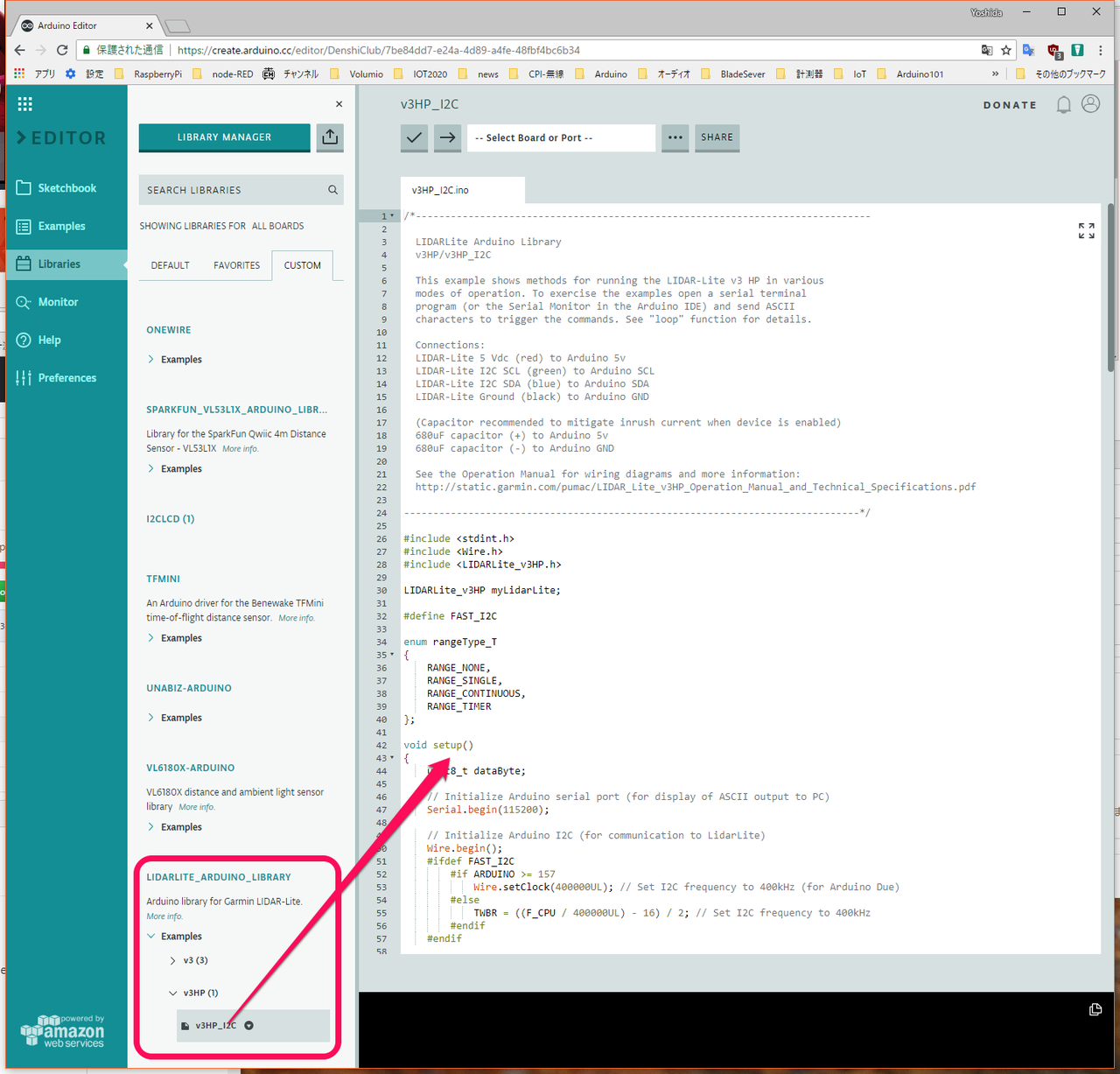
LibrariesのCustomから、新たに追加されたLIDARLite_Arduino_LibraryのExamplesの中にあるv3HP_I2Cを読み込みます。
●実行
スケッチをコンパイルして書き込み、Monitorを開きます。シリアルの通信速度をスケッチに書かれている115200に変更します。この状態では、シリアルからコマンドを待っている状態なので、連続読み取りの’C’を入力し、Sendをクリックすると測定値をcm単位で表示します。
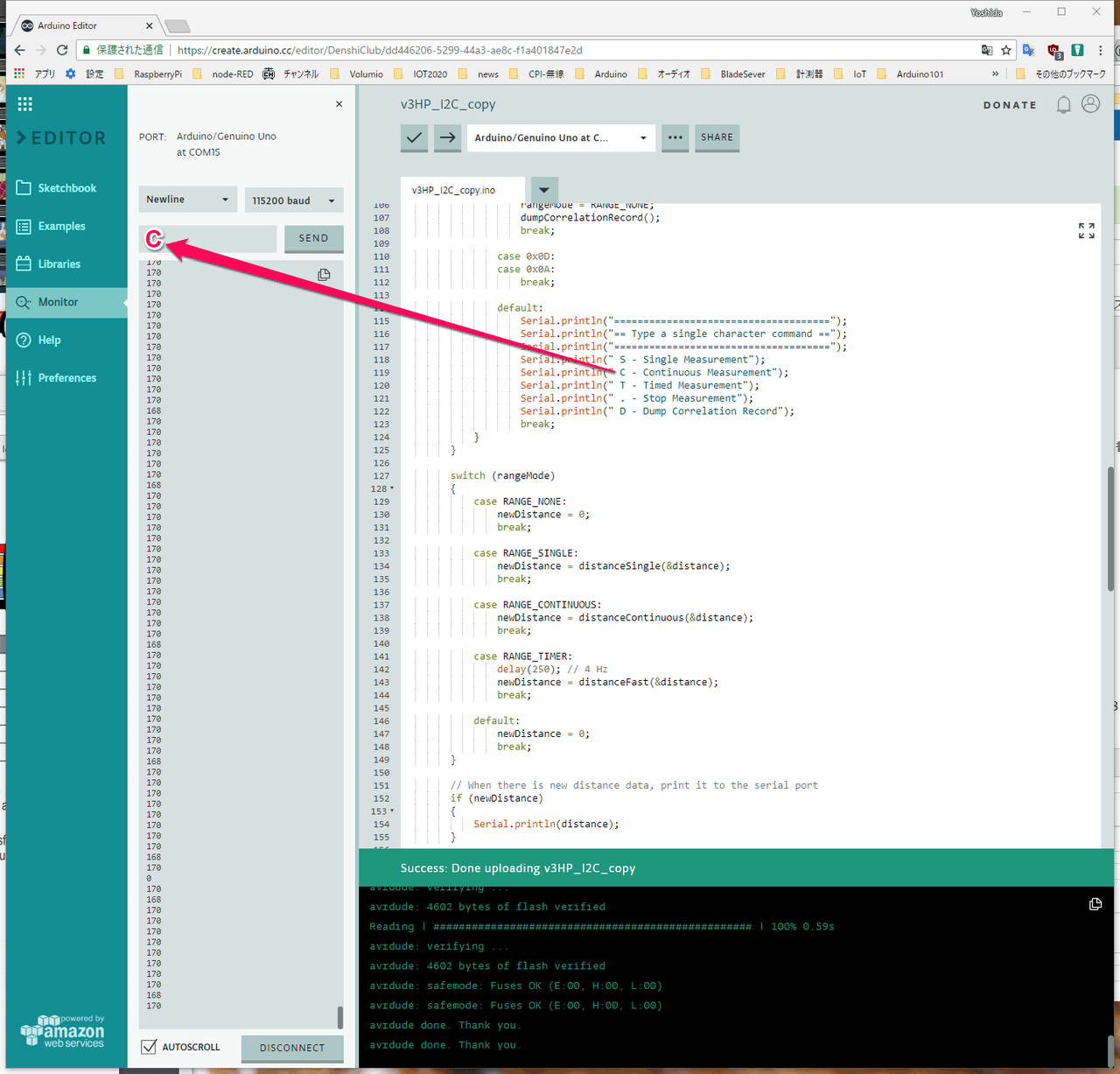
170cmはテーブルの上にLIDAR-Lite v3HPを天井に向けて置いている状態の値です。レポート用紙をセンサの上に掲げると、数cm単位まで表示します。窓側に向けると、角度によって変な値も出ますが、数mの値を表示します。