Raspberry PiにI2CインターフェースのLCDモジュールを接続する(4)I2cDeviceクラス
■I2cDeviceクラスと非同期処理
I2Cの通信のため クラスI2cDeviceと呼ばれるクラスが用意されています。このクラスを利用して、I2CインターフェースをもつLCDキャラクタ・ディスプレイ・モジュールに必要な事項を表するプログラムを作成します。利用するモジュールは、秋月電子通商で販売している「I2C接続キャラクタLCDモジュール」で、本Webの「ArduinoにLCDキャラクタ・ディスプレイ・モジュールを接続する(1)」で利用するものと同じものです。
Arduino場合のプログラムとRaspberry PiのC#では、プログラムの書き方が少し異なります。しかし、LCDへの書き込み方法は同様ですので、そちらの記事も参考にしてください。
●I2cDeviceクラスの使い方
I2CDeviceクラスの使い方は、
- Windows10 IoT Coreのサンプル・プログラムI2CAccelerometer
- Microsoft Developerのサイトの「I2Cの温度センサーをWindows 10 IoT Core for Raspberry PI2で使う」
の記事を参考にさせてもらい、プログラムの一部を利用させていただきました。
https://blogs.msdn.microsoft.com/hirosho/2015/05/31/i2cwindows-10-iot-core-for-raspberry-pi2/
I2Cのデバイスは、I2cDevice classとしてクラス・ライブラリのかたちで提供されます。このクラスを利用するためにプログラムの最初に、
| using Windows.Device.I2c; |
の記述を追加します。
今回は、I2cDevice型のI2CTMP102の定義を、次の命令で行います。
| private I2cDevice I2CTMP102; |
このI2CTMP102のインスタンス作成は、次のようにして行います。
|
これで、I2CTMP102でTMP102の読み書きができるようになります。
●非同期処理のasyncとawait
DeviceInformation.FindAllAsync(aqs)とI2cDevice.FromIdAsync(dis[0].Id, settings)は、非同期的に処理が行われます。そのために、それぞれの命令の前に非同期的な処理を指定するawaitが記述されています。また非同期処理を行う関数であることを示すために、関数名の前にasyncを記述します。
●温度センサTMP102の読み書き
TMP102からの温度読み取りの関数は、次のようになります。
- 温度の読み取りを指定する0x00のコマンドを書き込む
- その後2バイトのデータを読み取る
書き込みデータの1バイトのバッファwriteBuf、読み取ったデータを格納する2バイトのバッファreadBufを用意して、WriteReadメソッドで、次のように温度の測定を行います。読み取った値の桁を調整し、加算し、測定データを得ます。得たデータに0.0625を乗算して、測定結果を得ます。
|
private double get_temp() |
この関数の中で、測定データreadingを文字列にTostring()メソッドで変換し、表示画面のテキスト・ブロックに、次の命令で書き込んでいます。
| textBlock.Text = reading.ToString(); |
前回のカウントアップの数値は書き込まれなくなりました。後でともに表示する方法を検討します。
タイマで起動される関数Timer_Tick()に、温度測定の関数get_temp()を追加しました。
| private void Timer_Tick(object sender, object e) { var currentTemp = get_temp(); cnt = cnt + 1; } |
少し未整備な部分もありますが、これで動作確認を行いました。
デバッグを開始し、MainPage()最初のブレークポイントで停止しています。
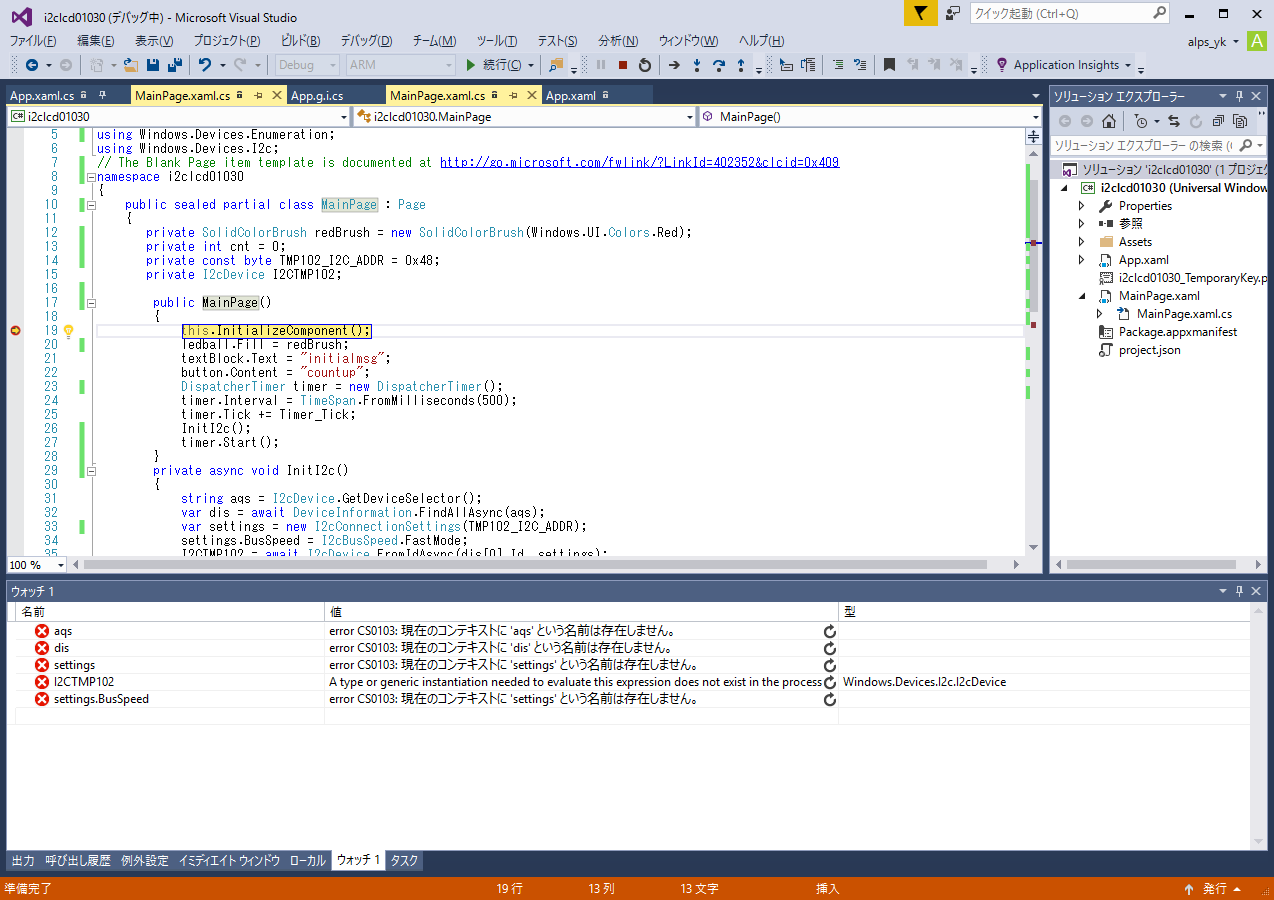
このときのRaspberry Piのモニタ画面は、次のようになっています。
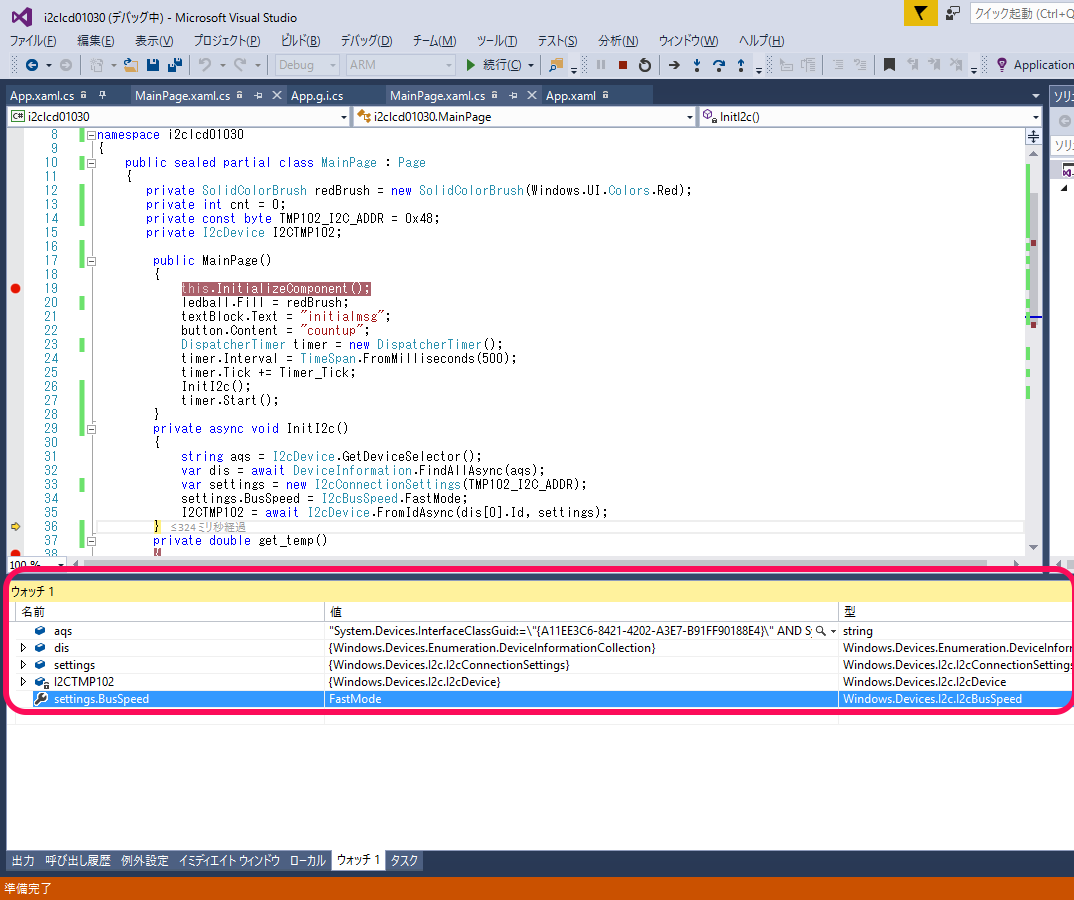
I2Cの初期化関数InitI2c()の関数内の命令を順番に処理していくと、次に示すようにウォッチ1のリストの内容が順番に埋まっていきます。
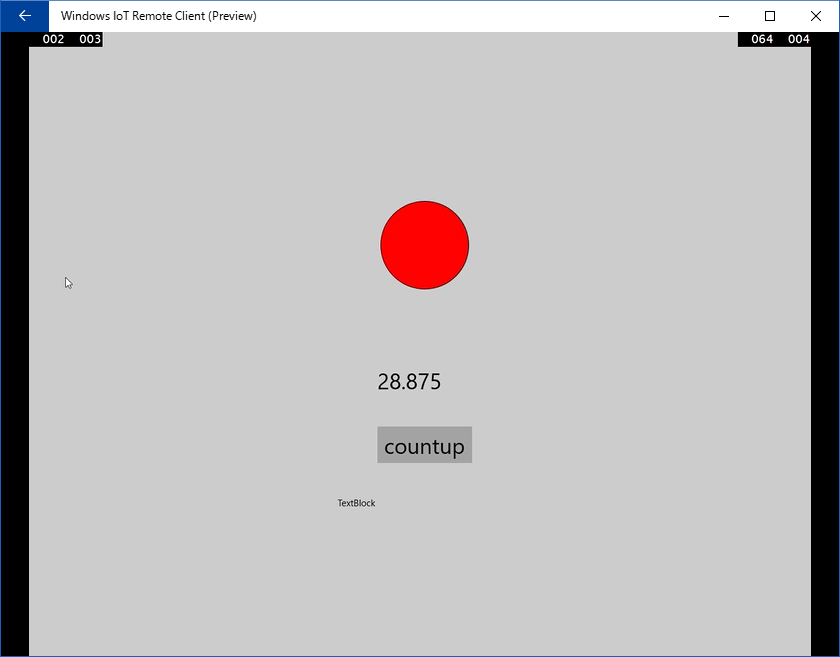
タイマがスタートすると、測定データが表示されます。TMP102に手をのせると、体温で表示温度が変化します。
今回テストしたプログラムのMainPage.xaml.csを次に示します。テスト中のプログラムなので今後変わっていきますが、動作確認に利用できます。
| using System; using Windows.UI.Xaml; using Windows.UI.Xaml.Controls; using Windows.UI.Xaml.Media; using Windows.Devices.Enumeration; using Windows.Devices.I2c; // The Blank Page item template is documented at http://go.microsoft.com/fwlink/?LinkId=402352&clcid=0x409 namespace i2clcd01030 { public sealed partial class MainPage : Page { private SolidColorBrush redBrush = new SolidColorBrush(Windows.UI.Colors.Red); private int cnt = 0; private const byte TMP102_I2C_ADDR = 0x48; private I2cDevice I2CTMP102; public MainPage() |
(2016/10/3 V1.0)
<神崎康宏>