Arduino UNO R4 Minimaでセンサ・インターフェーシング ㊳ IMU LSM6DSOX
AdafruitのIMU(イナーシャル・メジャーメント・ユニット)LSM6DSOX(ST Microelectronics)を利用します。
3軸の加速度センサに3軸のジャイロ・センサが組み合わされています。
●AdafruitのStemma QT/Qwiicボード
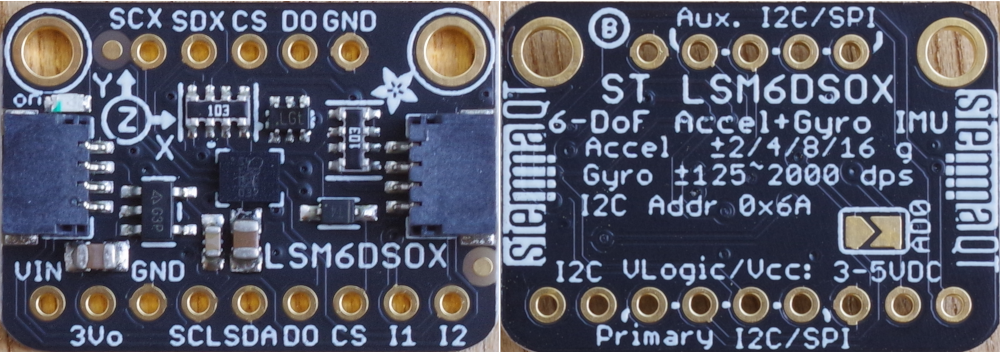
Stemma QT/Qwiic(JST SH 4ピン)コネクタは2か所に装着されていて、どちらにつないでもかまいません。このコネクタを使ってI2Cで制御する場合、特に、ジャンパ線をつなぐなどは不要です。
コネクタは、表と裏のどちらも差し込めそうですが、ピンが内部の上部に並んでいるので、差し込める方向は一意です。ロック機構はないですが、すぐに抜けるということはありません。
●IMU LSM6DSOXのおもなスペック
- 動作電圧 1.71~3.6V
- 動作温度範囲 -40~+85°C
- 加速度測定範囲 ±2、±4、±8、±16g
- ジャイロ測定範囲 フルスケール・レンジ±250、 ±500、±1000、±2000dps
- インターフェース I2C(最大400kHz)、SPI(最大10MHz)、MIPI I3C
- I2Cアドレス デフォルト0x6a、裏面のAD0ジャンパで0x6bに変更可(I2Cバスをスキャンすると、このアドレス以外に0x7eが見つかる)
●使用環境
- Arduino UNO R4 Minima
- Arduino IDE 2.2.1
- Windows10 22H2
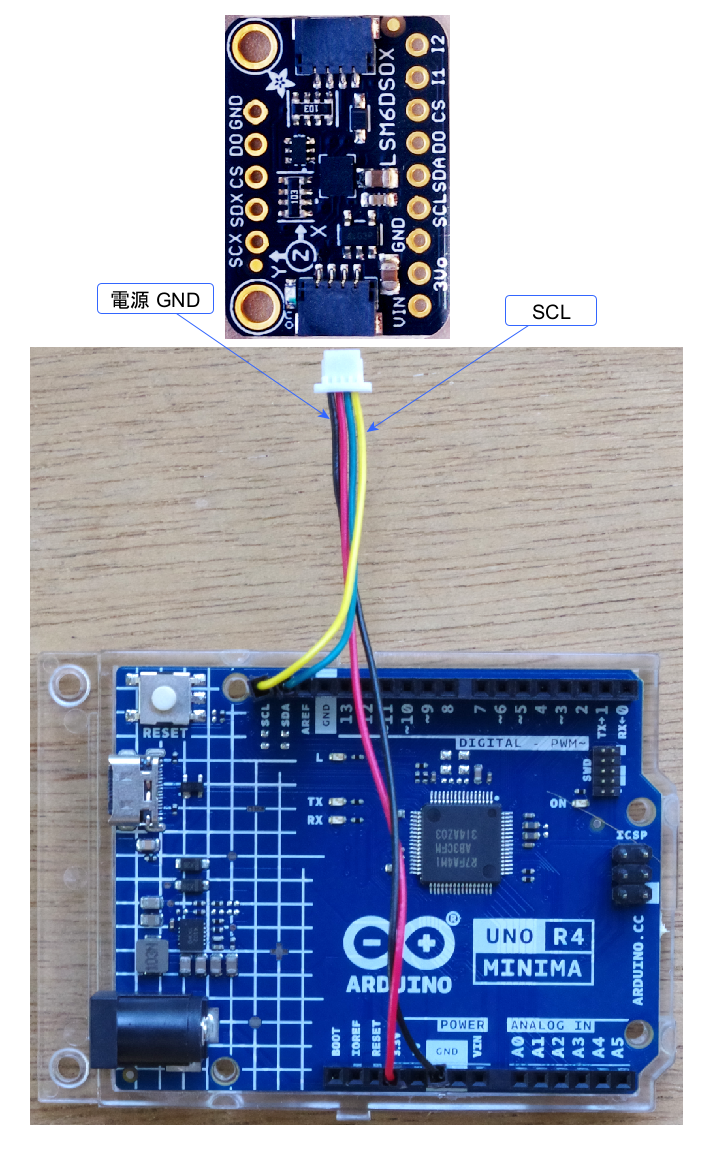
●接続
Arduino UNO R4 MinimaのI2C信号とセンサ・ボードをJSTコネクタでつなぎます(Stemma QT/Qwiicボードの写真の比率は異なる)。
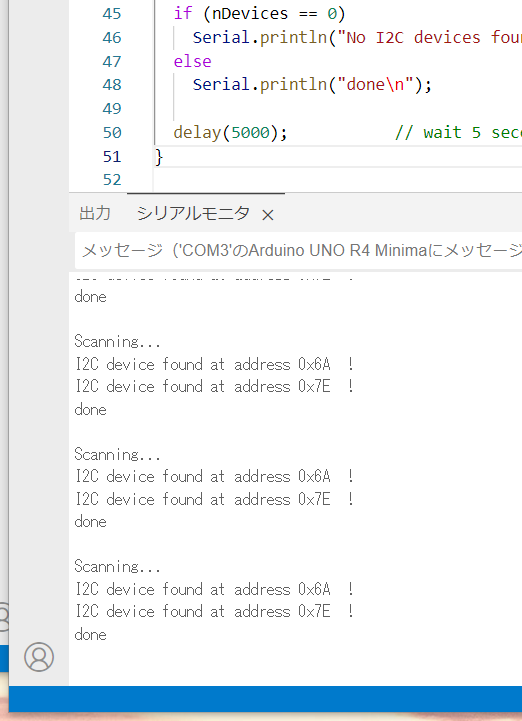
●スレーブ・アドレスを確認
従来からよく使われているi2cScanner.inoを動かしてスレーブ・アドレスを確認します。電源は3.3Vです。
0x6aと0x7eを見つけてきました。
●ライブラリの用意
LSM6DSで検索して見つかった Adafruit LSM6DSライブラリをインストールします。
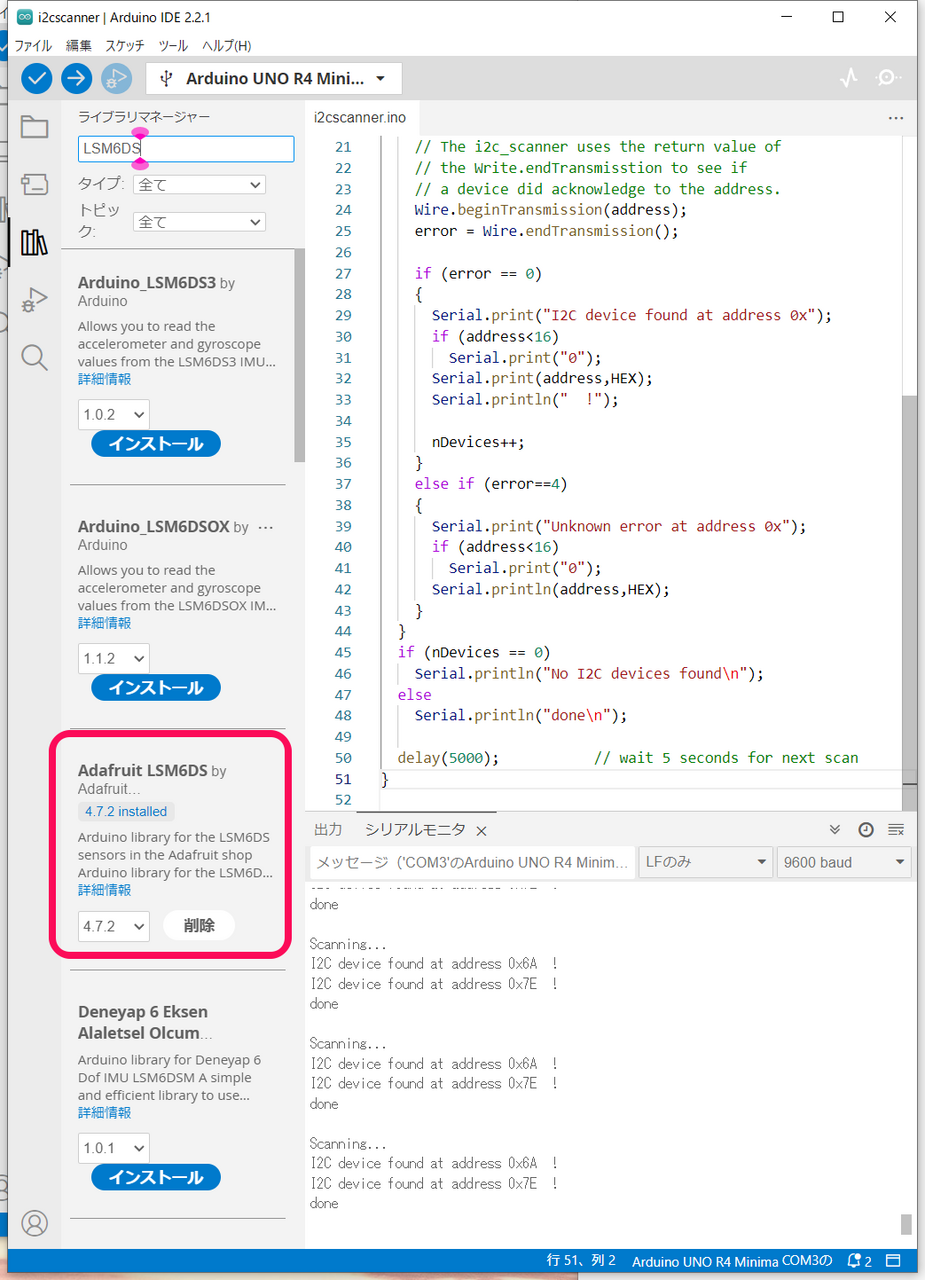
インストールを始めたとき、関連のライブラリや依存関係をインストールするかというパネルが出た場合は、全てをインストールします。
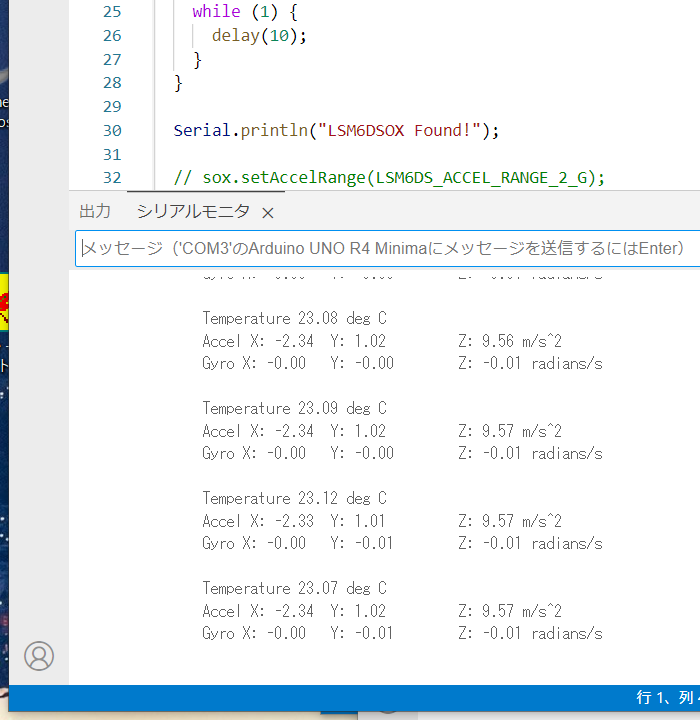
●サンプル・スケッチ
メニューのファイル->スケッチ例の、Adafruit LSM6DSから adafruit_lsm6dsox_test.inoを選択します。
コンパイル、実行します。
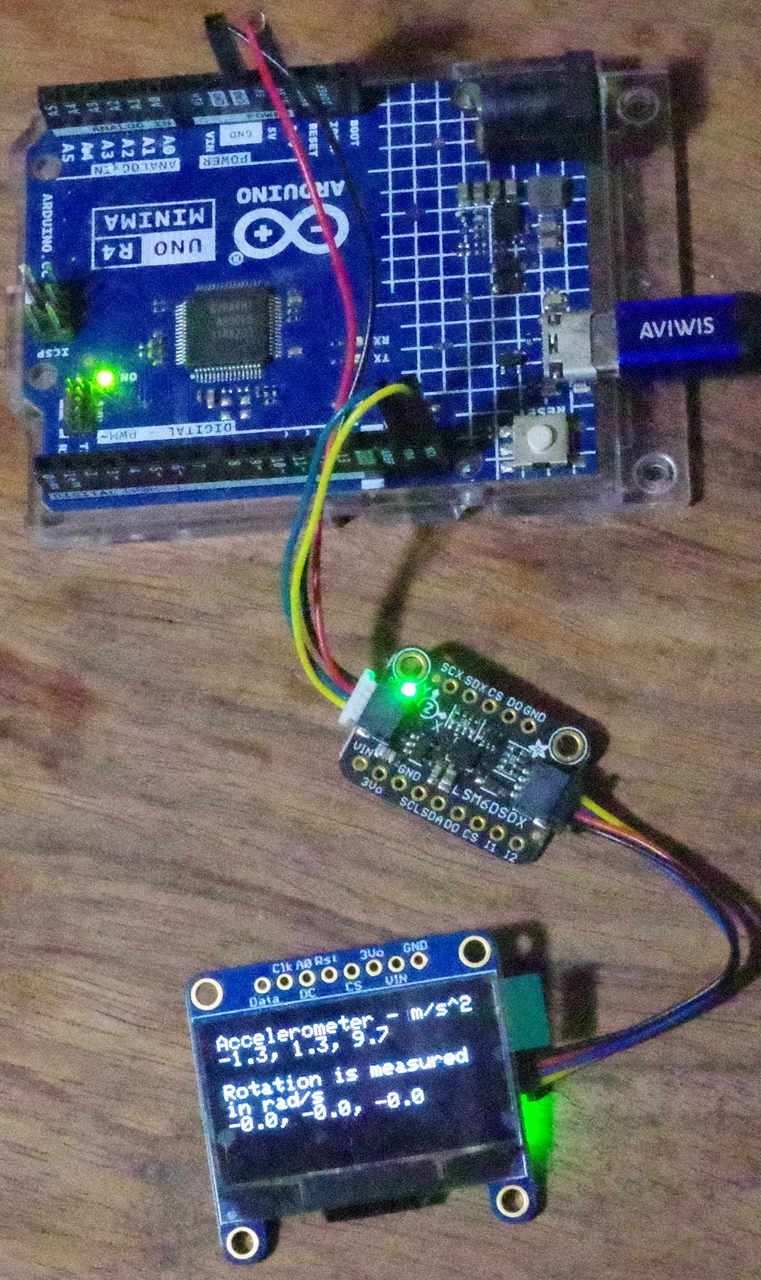
●グラフィック・ディスプレイに測定結果を表示
次の記事を参考に、グラフィック・ディスプレイに測定した値を表示します。
Arduino UNO R4 Minimaでセンサ・インターフェーシング ⑤ 温湿度センサSi7021の測定結果をグラフィック・ディスプレイに表示
スケッチです。
// Basic demo for accelerometer & gyro readings from Adafruit
// LSM6DSOX sensor
#include <Adafruit_LSM6DSOX.h>
#include <Adafruit_SSD1306.h>
Adafruit_LSM6DSOX sox;
Adafruit_SSD1306 display = Adafruit_SSD1306(128, 64, &Wire);
void setup(void) {
Serial.begin(115200);
while (!Serial)
delay(10); // will pause Zero, Leonardo, etc until serial console opens
Serial.println("Adafruit LSM6DSOX + ssd1306");
if (!sox.begin_I2C()) {
Serial.println("Failed to find LSM6DSOX chip");
while (1) {
delay(10);
}
}
Serial.println("LSM6DSOX Found!");
// sox.setAccelRange(LSM6DS_ACCEL_RANGE_2_G);
Serial.print("Accelerometer range set to: ");
switch (sox.getAccelRange()) {
case LSM6DS_ACCEL_RANGE_2_G:
Serial.println("+-2G");
break;
case LSM6DS_ACCEL_RANGE_4_G:
Serial.println("+-4G");
break;
case LSM6DS_ACCEL_RANGE_8_G:
Serial.println("+-8G");
break;
case LSM6DS_ACCEL_RANGE_16_G:
Serial.println("+-16G");
break;
}
// sox.setGyroRange(LSM6DS_GYRO_RANGE_250_DPS );
Serial.print("Gyro range set to: ");
switch (sox.getGyroRange()) {
case LSM6DS_GYRO_RANGE_125_DPS:
Serial.println("125 degrees/s");
break;
case LSM6DS_GYRO_RANGE_250_DPS:
Serial.println("250 degrees/s");
break;
case LSM6DS_GYRO_RANGE_500_DPS:
Serial.println("500 degrees/s");
break;
case LSM6DS_GYRO_RANGE_1000_DPS:
Serial.println("1000 degrees/s");
break;
case LSM6DS_GYRO_RANGE_2000_DPS:
Serial.println("2000 degrees/s");
break;
case ISM330DHCX_GYRO_RANGE_4000_DPS:
break; // unsupported range for the DSOX
}
// sox.setAccelDataRate(LSM6DS_RATE_12_5_HZ);
Serial.print("Accelerometer data rate set to: ");
switch (sox.getAccelDataRate()) {
case LSM6DS_RATE_SHUTDOWN:
Serial.println("0 Hz");
break;
case LSM6DS_RATE_12_5_HZ:
Serial.println("12.5 Hz");
break;
case LSM6DS_RATE_26_HZ:
Serial.println("26 Hz");
break;
case LSM6DS_RATE_52_HZ:
Serial.println("52 Hz");
break;
case LSM6DS_RATE_104_HZ:
Serial.println("104 Hz");
break;
case LSM6DS_RATE_208_HZ:
Serial.println("208 Hz");
break;
case LSM6DS_RATE_416_HZ:
Serial.println("416 Hz");
break;
case LSM6DS_RATE_833_HZ:
Serial.println("833 Hz");
break;
case LSM6DS_RATE_1_66K_HZ:
Serial.println("1.66 KHz");
break;
case LSM6DS_RATE_3_33K_HZ:
Serial.println("3.33 KHz");
break;
case LSM6DS_RATE_6_66K_HZ:
Serial.println("6.66 KHz");
break;
}
// sox.setGyroDataRate(LSM6DS_RATE_12_5_HZ);
Serial.print("Gyro data rate set to: ");
switch (sox.getGyroDataRate()) {
case LSM6DS_RATE_SHUTDOWN:
Serial.println("0 Hz");
break;
case LSM6DS_RATE_12_5_HZ:
Serial.println("12.5 Hz");
break;
case LSM6DS_RATE_26_HZ:
Serial.println("26 Hz");
break;
case LSM6DS_RATE_52_HZ:
Serial.println("52 Hz");
break;
case LSM6DS_RATE_104_HZ:
Serial.println("104 Hz");
break;
case LSM6DS_RATE_208_HZ:
Serial.println("208 Hz");
break;
case LSM6DS_RATE_416_HZ:
Serial.println("416 Hz");
break;
case LSM6DS_RATE_833_HZ:
Serial.println("833 Hz");
break;
case LSM6DS_RATE_1_66K_HZ:
Serial.println("1.66 KHz");
break;
case LSM6DS_RATE_3_33K_HZ:
Serial.println("3.33 KHz");
break;
case LSM6DS_RATE_6_66K_HZ:
Serial.println("6.66 KHz");
break;
}
// SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally
if (!display.begin(SSD1306_SWITCHCAPVCC, 0x3D)) { // Address 0x3C for 128x32
Serial.println(F("SSD1306 allocation failed"));
for (;;)
; // Don't proceed, loop forever
}
display.display();
delay(500); // Pause for 2 seconds
display.setTextSize(1);
display.setTextColor(WHITE);
display.setRotation(0);
display.clearDisplay();
}
void loop() {
// /* Get a new normalized sensor event */
sensors_event_t accel;
sensors_event_t gyro;
sensors_event_t temp;
sox.getEvent(&accel, &gyro, &temp);
Serial.print("\t\tTemperature ");
Serial.print(temp.temperature);
Serial.println(" deg C");
/* Display the results (acceleration is measured in m/s^2) */
Serial.print("\t\tAccel X: ");
Serial.print(accel.acceleration.x);
Serial.print(" \tY: ");
Serial.print(accel.acceleration.y);
Serial.print(" \tZ: ");
Serial.print(accel.acceleration.z);
Serial.println(" m/s^2 ");
/* Display the results (rotation is measured in rad/s) */
Serial.print("\t\tGyro X: ");
Serial.print(gyro.gyro.x);
Serial.print(" \tY: ");
Serial.print(gyro.gyro.y);
Serial.print(" \tZ: ");
Serial.print(gyro.gyro.z);
Serial.println(" radians/s ");
Serial.println();
display.clearDisplay();
display.setCursor(0, 0);
display.println("Accelerometer - m/s^2");
display.print(accel.acceleration.x, 1);
display.print(", ");
display.print(accel.acceleration.y, 1);
display.print(", ");
display.print(accel.acceleration.z, 1);
display.println("");
display.println("");
display.println("Rotation is measured in rad/s");
display.print(gyro.gyro.x, 1);
display.print(", ");
display.print(gyro.gyro.y, 1);
display.print(", ");
display.print(gyro.gyro.z, 1);
display.println("");
display.display();
delay(500);
}