Arduino UNO R4 Minimaでセンサ・インターフェーシング ㉞ 加速度センサ MSA301
Adafruitの3軸加速度センサ MSA301(MEMSensing Microsystems)を利用します。
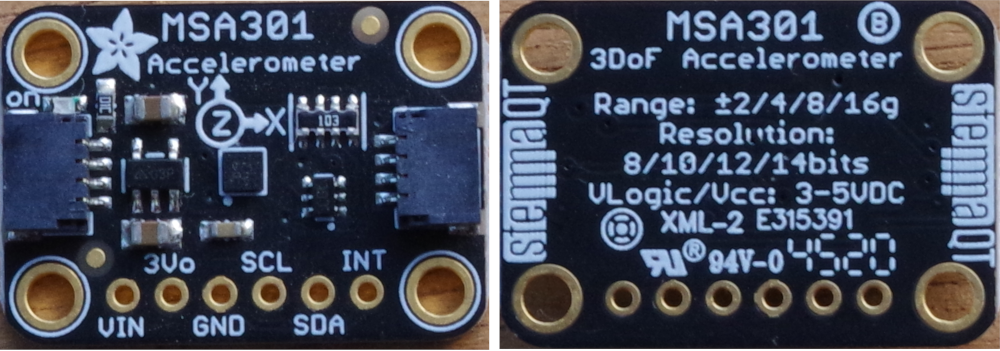
●AdafruitのStemma QT/Qwiicボード
Stemma QT/Qwiic(JST SH 4ピン)コネクタは2か所に装着されていて、どちらにつないでもかまいません。このコネクタを使ってI2Cで制御する場合、特に、ジャンパ線をつなぐなどは不要です。
コネクタは、表と裏のどちらも差し込めそうですが、ピンが内部の上部に並んでいるので、差し込める方向は一意です。ロック機構はないですが、すぐに抜けるということはありません。
●加速度センサMSA301のおもなスペック
- 動作電圧 1.62~3.6V
- 動作温度範囲 -40~+85°C
- 加速度測定範囲 ±2、±4、±8、±16g;14ビット
- インターフェース I2C(最大400kHz)
- スレーブ・アドレス 0x26
●使用環境
- Arduino UNO R4 Minima
- Arduino IDE 2.2.1
- Windows10 22H2
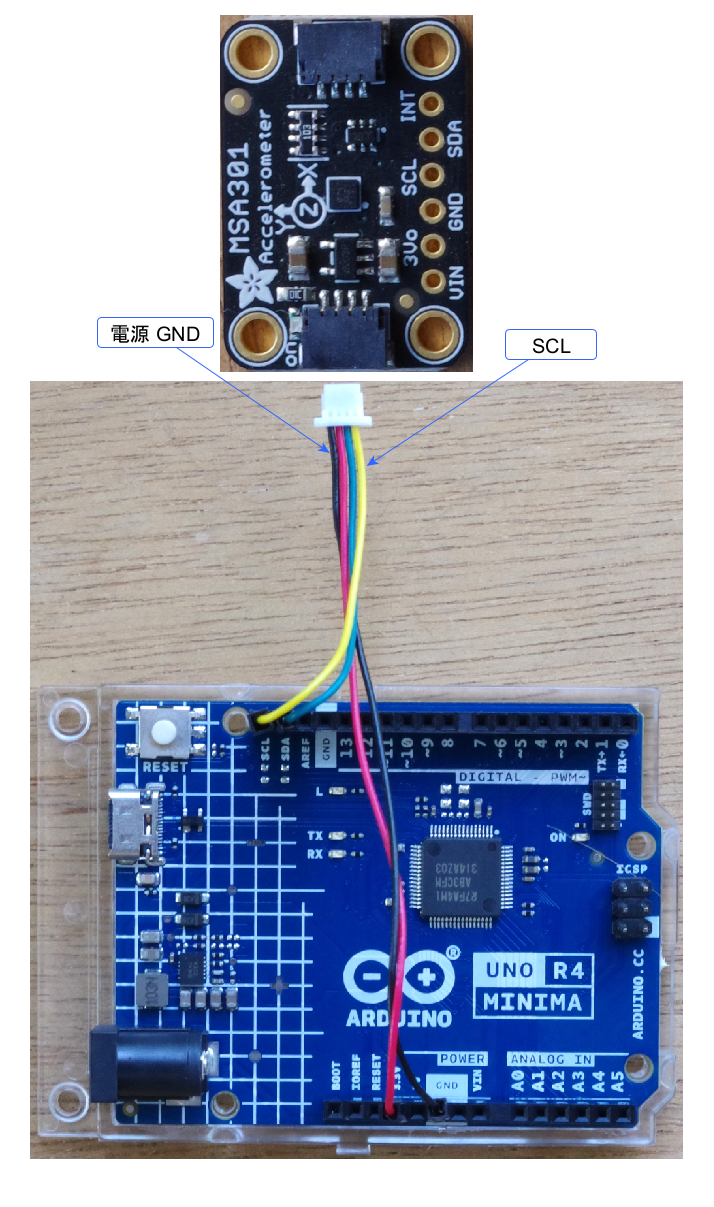
●接続
Arduino UNO R4 MinimaのI2C信号とセンサ・ボードをJSTコネクタでつなぎます(Stemma QT/Qwiicボードの写真の比率は異なる)。
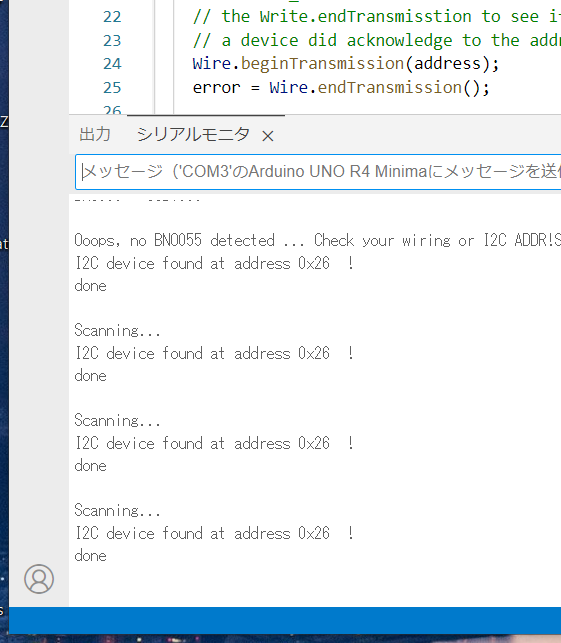
●スレーブ・アドレスを確認
従来からよく使われているi2cScanner.inoを動かしてスレーブ・アドレスを確認します。電源は3.3Vです。
0x26を見つけてきました。
●ライブラリの用意
MSA301で検索して、見つかった Adafruit MSA301ライブラリをインストールします。
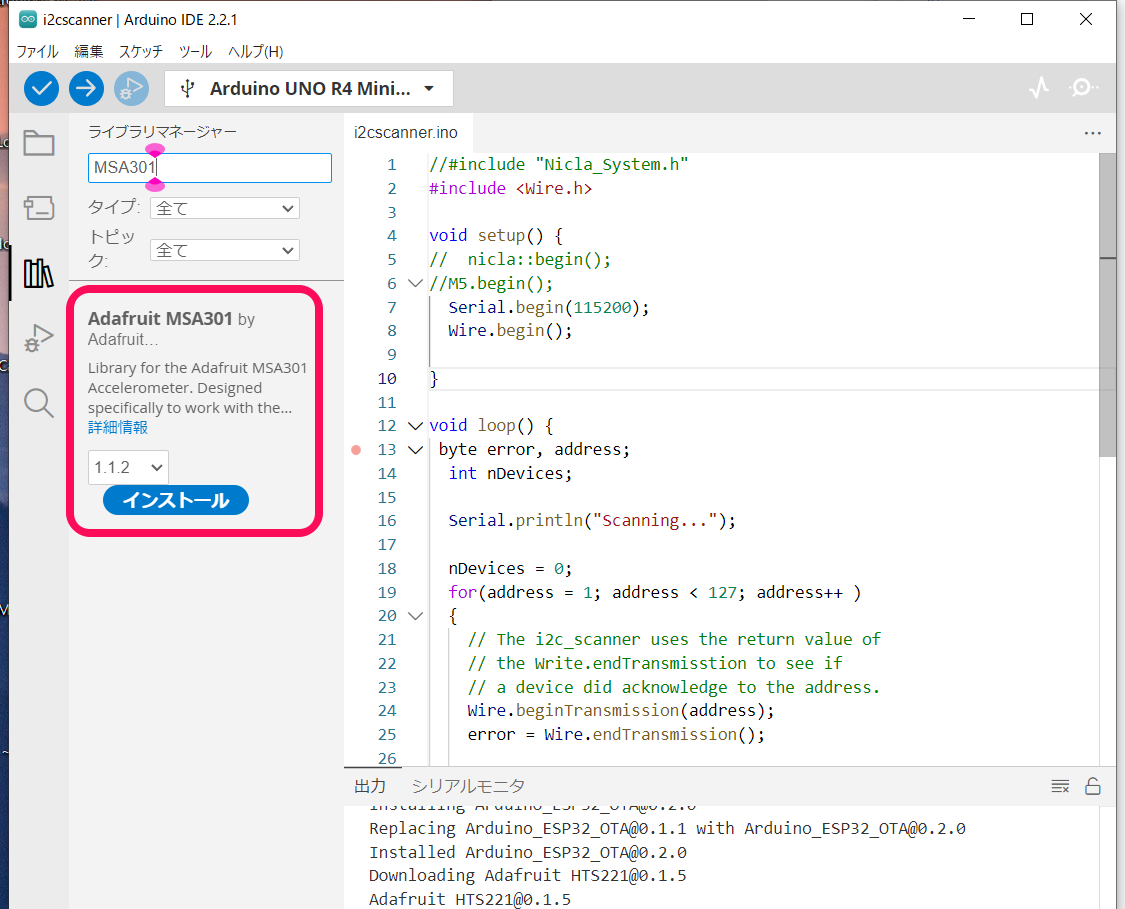
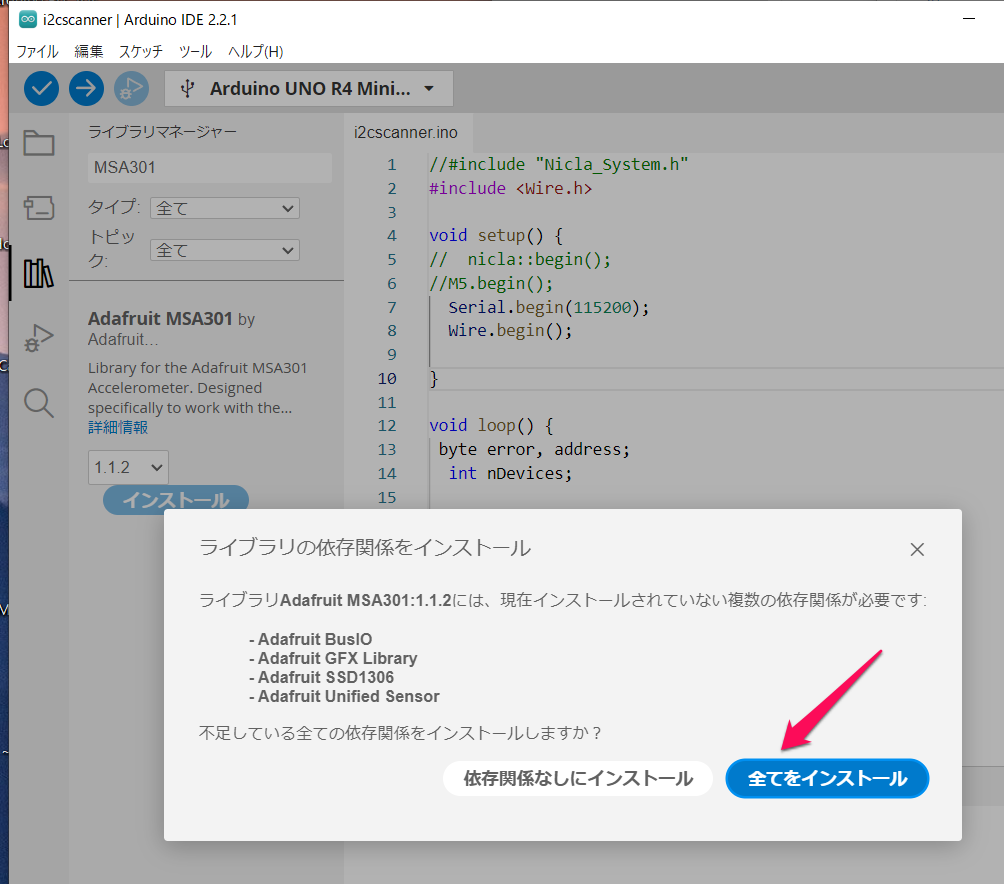
インストールを始めたとき、関連のライブラリや依存関係をインストールするかというパネルが出た場合は、全てをインストールを選びます。
●サンプル・スケッチ
メニューのファイル->スケッチ例から、Adafruit MSA301のacceldemo.inoを選択します。
コンパイル、実行します。
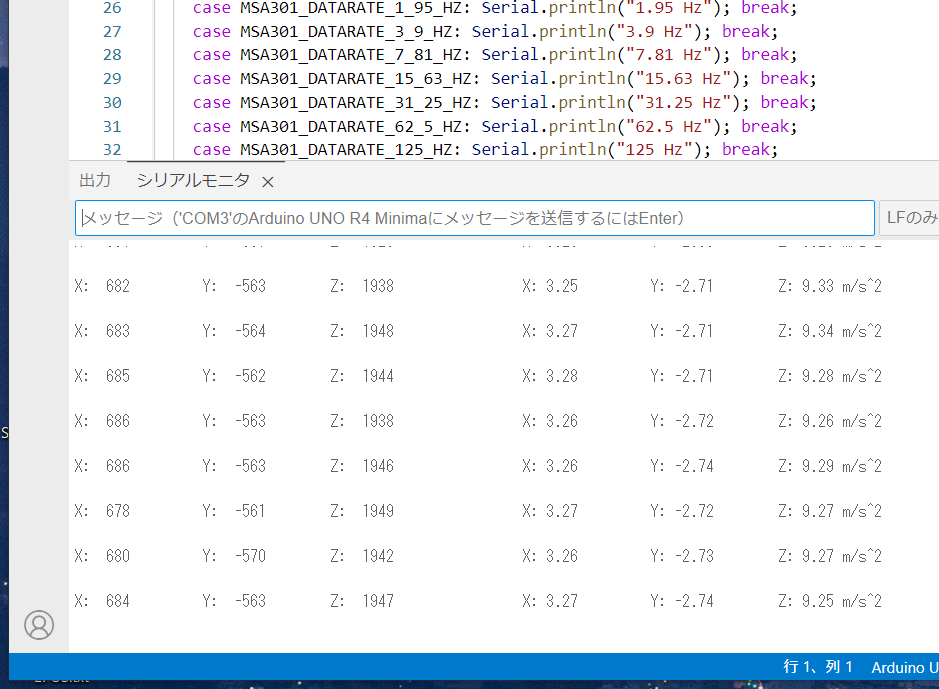
最初のX:、Y:、Z:がrawデータで、つぎのX:、Y:、Z:が m/s^2単位の加速度です。
重力加速度 1gは、9.8m/s^2です。
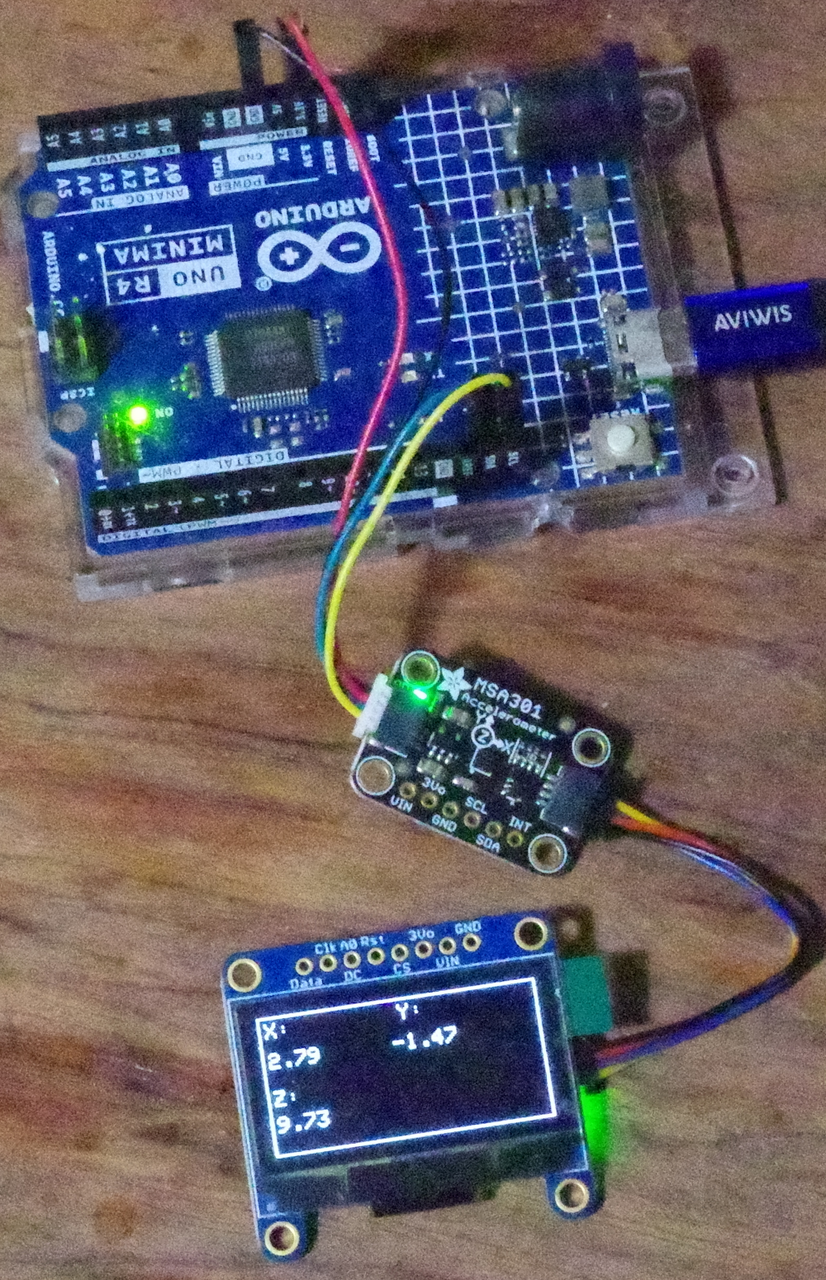
●グラフィック・ディスプレイに測定結果を表示
次の記事を参考に、グラフィック・ディスプレイに測定した値を表示します。
Arduino UNO R4 Minimaでセンサ・インターフェーシング ⑤ 温湿度センサSi7021の測定結果をグラフィック・ディスプレイに表示
スケッチです。
// Basic demo for accelerometer readings from Adafruit MSA301
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <Adafruit_MSA301.h>
#include <Adafruit_Sensor.h>
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 64 // OLED display height, in pixels
#define OLED_RESET -1 // Reset pin # (or -1 if sharing Arduino reset pin)
#define SCREEN_ADDRESS 0x3D ///< See datasheet for Address; 0x3D for 128x64, 0x3C for 128x32
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
Adafruit_MSA301 msa;
void setup(void) {
Serial.begin(115200);
while (!Serial) delay(10); // will pause Zero, Leonardo, etc until serial console opens
Serial.println("Adafruit MSA301 test!");
// Try to initialize!
if (! msa.begin()) {
Serial.println("Failed to find MSA301 chip");
while (1) { delay(10); }
}
Serial.println("MSA301 Found!");
//msa.setDataRate(MSA301_DATARATE_31_25_HZ);
Serial.print("Data rate set to: ");
switch (msa.getDataRate()) {
case MSA301_DATARATE_1_HZ: Serial.println("1 Hz"); break;
case MSA301_DATARATE_1_95_HZ: Serial.println("1.95 Hz"); break;
case MSA301_DATARATE_3_9_HZ: Serial.println("3.9 Hz"); break;
case MSA301_DATARATE_7_81_HZ: Serial.println("7.81 Hz"); break;
case MSA301_DATARATE_15_63_HZ: Serial.println("15.63 Hz"); break;
case MSA301_DATARATE_31_25_HZ: Serial.println("31.25 Hz"); break;
case MSA301_DATARATE_62_5_HZ: Serial.println("62.5 Hz"); break;
case MSA301_DATARATE_125_HZ: Serial.println("125 Hz"); break;
case MSA301_DATARATE_250_HZ: Serial.println("250 Hz"); break;
case MSA301_DATARATE_500_HZ: Serial.println("500 Hz"); break;
case MSA301_DATARATE_1000_HZ: Serial.println("1000 Hz"); break;
}
//msa.setPowerMode(MSA301_SUSPENDMODE);
Serial.print("Power mode set to: ");
switch (msa.getPowerMode()) {
case MSA301_NORMALMODE: Serial.println("Normal"); break;
case MSA301_LOWPOWERMODE: Serial.println("Low Power"); break;
case MSA301_SUSPENDMODE: Serial.println("Suspend"); break;
}
//msa.setBandwidth(MSA301_BANDWIDTH_31_25_HZ);
Serial.print("Bandwidth set to: ");
switch (msa.getBandwidth()) {
case MSA301_BANDWIDTH_1_95_HZ: Serial.println("1.95 Hz"); break;
case MSA301_BANDWIDTH_3_9_HZ: Serial.println("3.9 Hz"); break;
case MSA301_BANDWIDTH_7_81_HZ: Serial.println("7.81 Hz"); break;
case MSA301_BANDWIDTH_15_63_HZ: Serial.println("15.63 Hz"); break;
case MSA301_BANDWIDTH_31_25_HZ: Serial.println("31.25 Hz"); break;
case MSA301_BANDWIDTH_62_5_HZ: Serial.println("62.5 Hz"); break;
case MSA301_BANDWIDTH_125_HZ: Serial.println("125 Hz"); break;
case MSA301_BANDWIDTH_250_HZ: Serial.println("250 Hz"); break;
case MSA301_BANDWIDTH_500_HZ: Serial.println("500 Hz"); break;
}
//msa.setRange(MSA301_RANGE_2_G);
Serial.print("Range set to: ");
switch (msa.getRange()) {
case MSA301_RANGE_2_G: Serial.println("+-2G"); break;
case MSA301_RANGE_4_G: Serial.println("+-4G"); break;
case MSA301_RANGE_8_G: Serial.println("+-8G"); break;
case MSA301_RANGE_16_G: Serial.println("+-16G"); break;
}
//msa.setResolution(MSA301_RESOLUTION_14 );
Serial.print("Resolution set to: ");
switch (msa.getResolution()) {
case MSA301_RESOLUTION_14: Serial.println("14 bits"); break;
case MSA301_RESOLUTION_12: Serial.println("12 bits"); break;
case MSA301_RESOLUTION_10: Serial.println("10 bits"); break;
case MSA301_RESOLUTION_8: Serial.println("8 bits"); break;
}
display.begin(SSD1306_SWITCHCAPVCC, SCREEN_ADDRESS);
display.clearDisplay();
display.drawRect(0, 0, display.width(), display.height(), SSD1306_WHITE);
display.setTextSize(1); // Normal 1:1 pixel scale
display.setTextColor(SSD1306_WHITE); // Draw white text
display.setCursor(3,3);
display.println("X:");
display.setCursor(64,3);
display.println("Y:");
display.setCursor(3,34);
display.println("Z:");
display.display();
delay(200);
}
void loop() {
msa.read(); // get X Y and Z data at once
// Then print out the raw data
Serial.print("X: "); Serial.print(msa.x);
Serial.print(" \tY: "); Serial.print(msa.y);
Serial.print(" \tZ: "); Serial.print(msa.z);
delay(100);
/* Or....get a new sensor event, normalized */
sensors_event_t event;
msa.getEvent(&event);
/* Display the results (acceleration is measured in m/s^2) */
Serial.print("\t\tX: "); Serial.print(event.acceleration.x);
Serial.print(" \tY: "); Serial.print(event.acceleration.y);
Serial.print(" \tZ: "); Serial.print(event.acceleration.z);
Serial.println(" m/s^2 ");
Serial.println();
display.setTextSize(1); // Draw 2X-scale text
display.setCursor(3,17);
display.fillRect(3, 17, 70, 16, SSD1306_BLACK);
display.println(event.acceleration.x);
display.setCursor(60,17);
display.fillRect(60, 17, 66, 16, SSD1306_BLACK);
display.println(event.acceleration.y);
display.setCursor(3, 46);
display.fillRect(3, 46, 100, 16, SSD1306_BLACK);
display.println(event.acceleration.z);
display.display();
delay(500);
}
実行例です。