CircuitPython 10行プログラミング Step9 (1) 準備(中断)
連載のSTEP1はとてもコンパクトなTrinket M0を、STEP2はArduino MEGAと大きさが同じGrand Central M4 Expressを利用しました。STEP3はAdafruit Metro M4 Express AirLift (WiFi)を利用しました。大きさはArduino UNOと同じです。
STEP4では、いろいろなセンサを搭載したAdafruit Feather nRF52840 Sense(別の名称;Feather Bluefruit Sense)を利用します。BLE(技適のコードがモジュール上に刻印されている)が利用できるボードです。同じBLEのモジュールが搭載されているのがAdafruit Feather nRF52840です。
STEP5では、Raspberry Pi Pico(RP2040)を利用しました。STEP6では、Raspberry Pi Pico(RP2040)といくつかのセンサを搭載したNano RP2040 Connectを利用しました。STEP7で利用するマイコン・ボードはXIAO RP2040です。前のRaspberry Pi Pico(RP2040)と同じCPUですが、コンパクトです。
2020年6月、CircuitPython 8.0.0 Alpha版がリリースしました。その前の安定版7.3.0に比べて特徴はうたわれていませんが、Espressif Systems社のロゴが表記されているので、スポンサか何かになったものと思われます。日本国内では、新しいシリーズの技適はほとんどとられていないので、利用できません。
STEP8では、Seeed XIAO BLE Senseを使いました。STEP7のXIAO RP2040と同じような形状をしていますが、RFはBluetooth 5.0 対応のNordic製nRF52840を搭載しています。ボード上には、MSM261D3526H1CPMディジタル・マイクと6軸IMUを搭載しています。
STEP9では、オペレーティング・システム(OS)なしで実行されるCircuitPython(7.1.0から)をラズパイで動かします。ラズパイは、コンパクトなRaspberry Pi Zero 2 Wを使います。CircuitPythonは、安定版のCircuitPython 7.3.1です。
●Raspberry Pi Zero 2 Wのおもなスペック
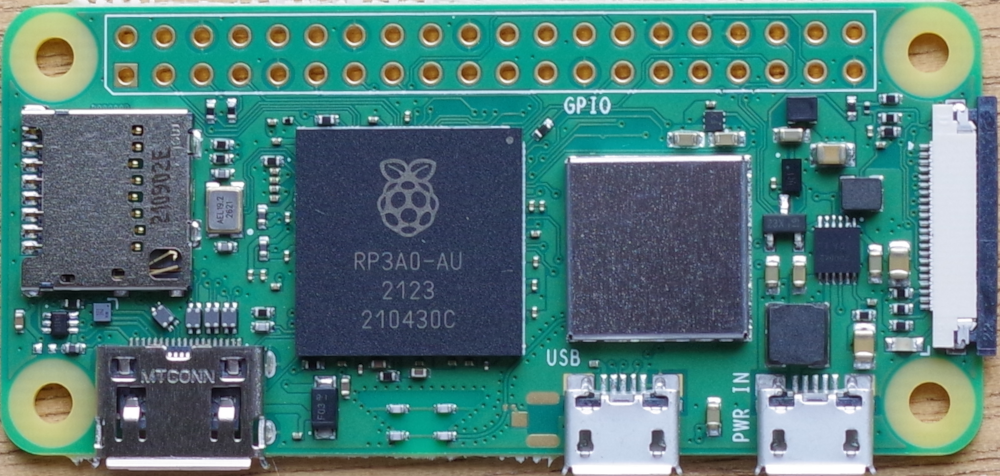
- CPU Broadcom BCM2710A1、クアッド・コア(Arm Cortex-A53@1 GHz)
- メモリ 512Mバイト LPDDR2 DRAM
- RF 802.11b/g/n 無線LAN、Bluetooth 4.2 / Bluetooth Low Energy(BLE)
- 映像出力 Mini HDMI
- USB 2.0 OTGポート
- 給電 Micro USB(5V/2.5A)
- 動作温度 -20~+70℃
- 寸法 65×30mm(高さ 最大5.2mm)
●動作環境
- Windows10 21H2
- Mu 1.1.1
●Circuitpythonバージョン 7.3.1を利用
Circuitpythonの最新版を利用するために、二つのファイルをダウンロードして、インストールします。
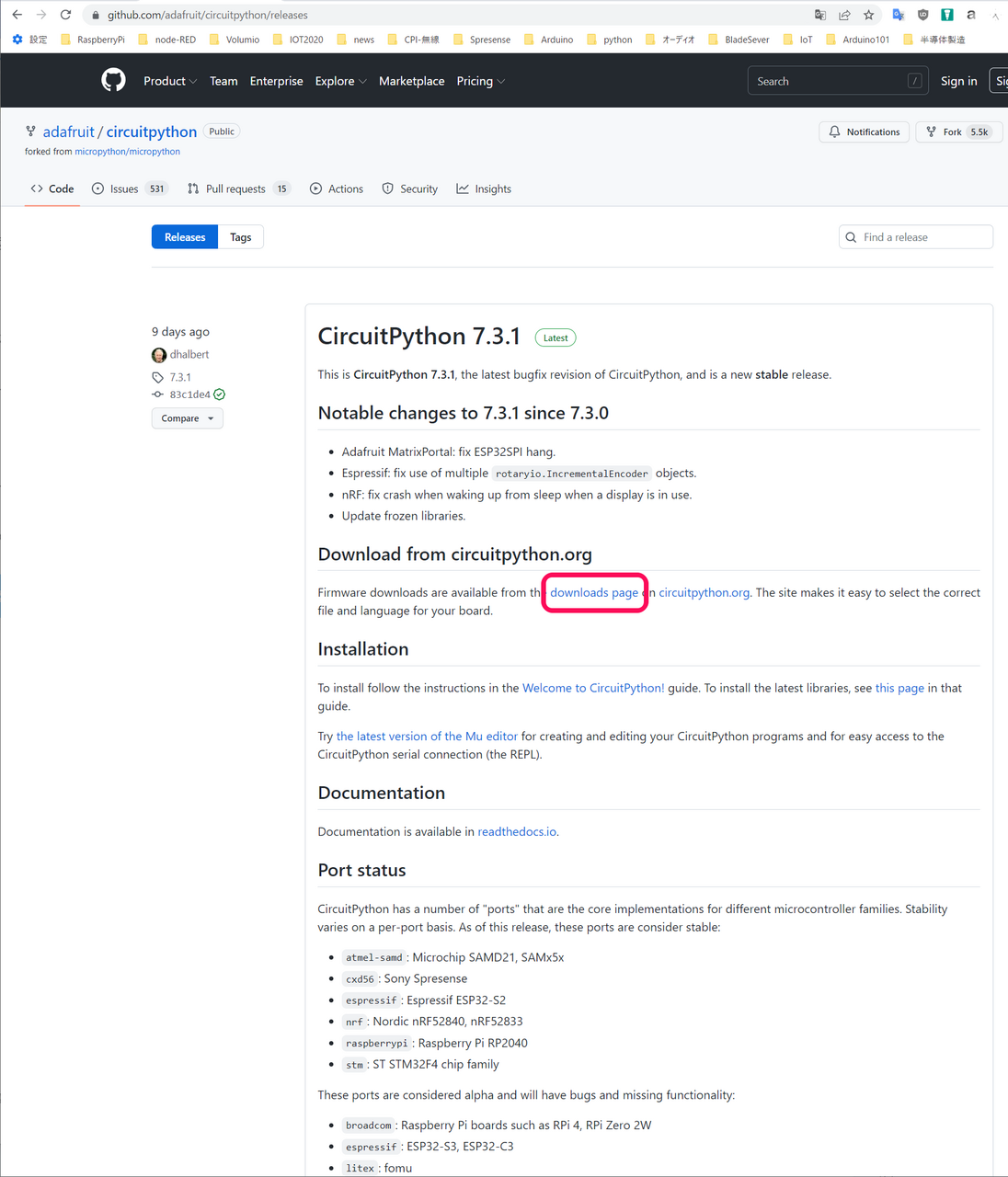
STEP1 下記のサイトからこのボードにあったUF2のファイルをダウンロードします。
https://github.com/adafruit/circuitpython/releases
downloads page をクリックします。
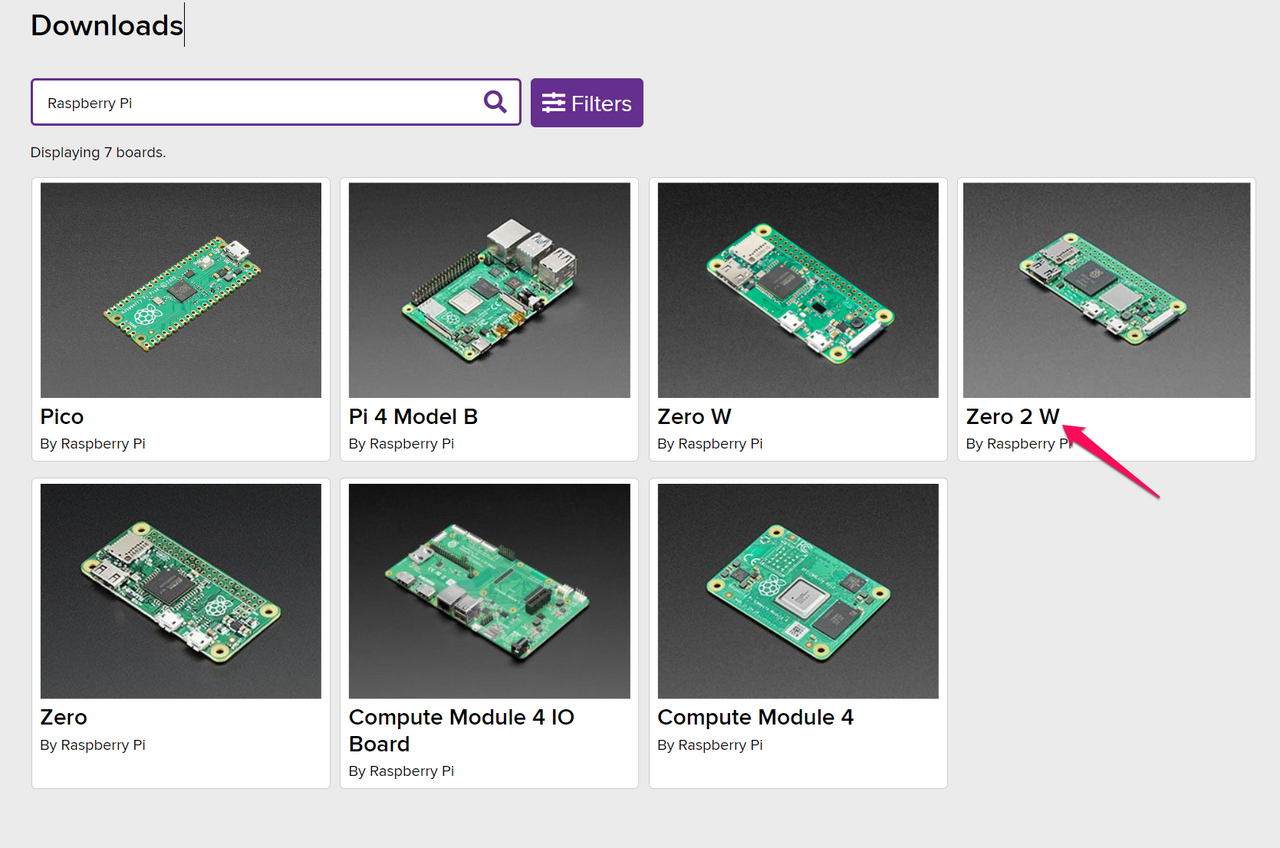
検索欄にRaspberry Pi と入れます。見つかったZero 2 Wをクリックします。
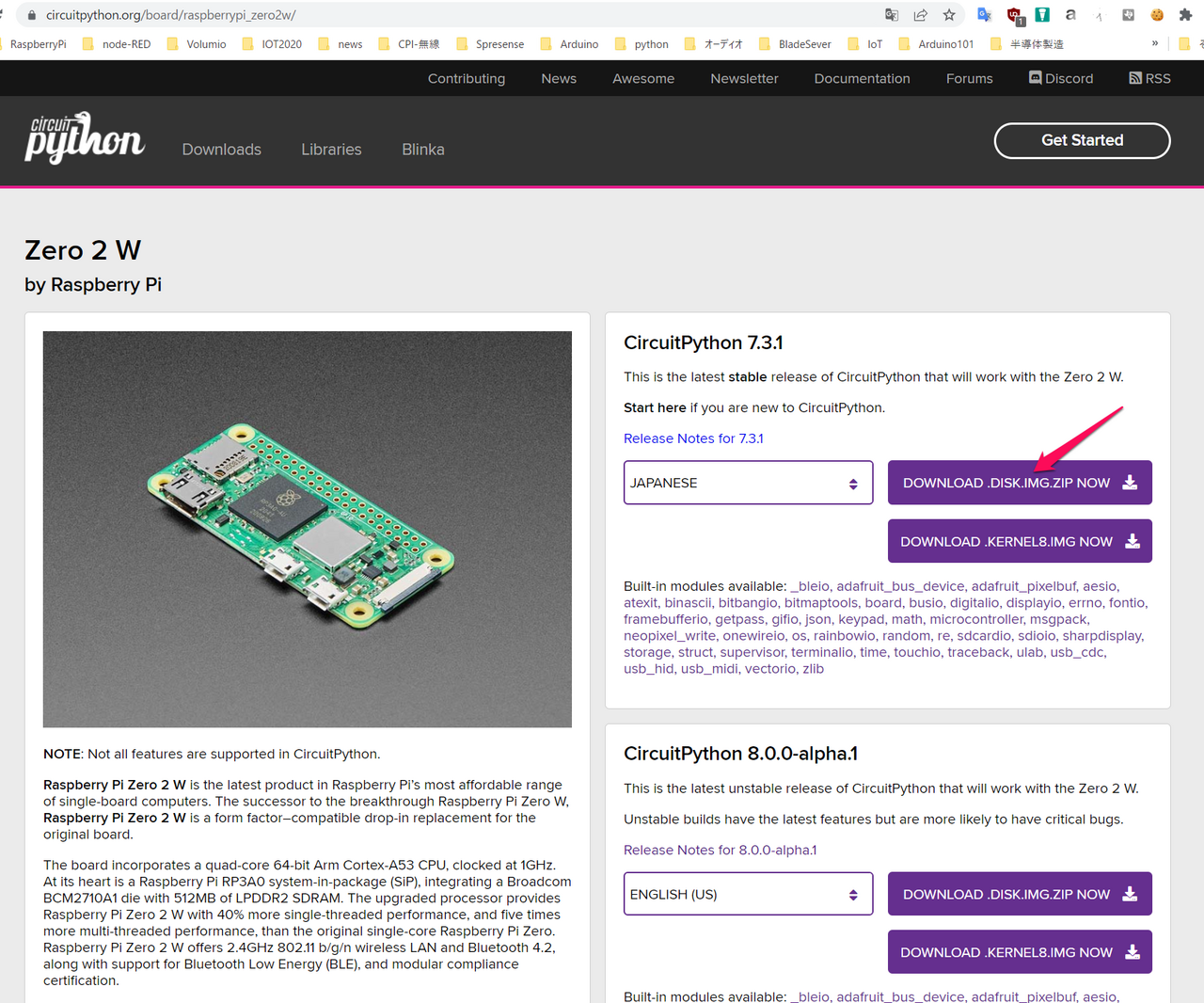
ZIPファイルをダウンロードします。
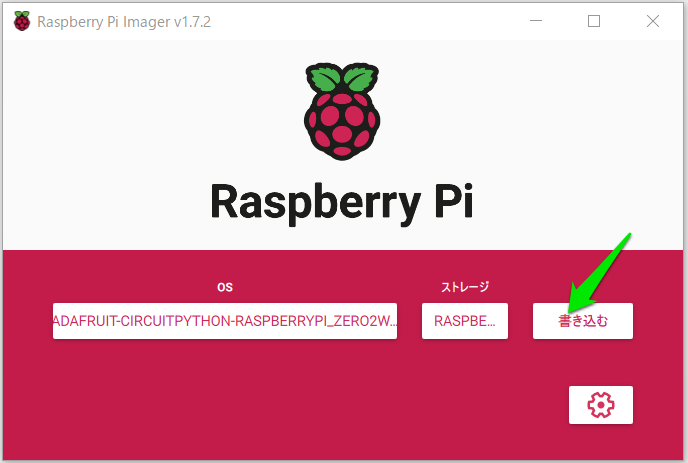
RaspberryPi Imager v1.7.2を立ち上げます。
OSを選ぶをクリックします。

スクロール・ダウンします。
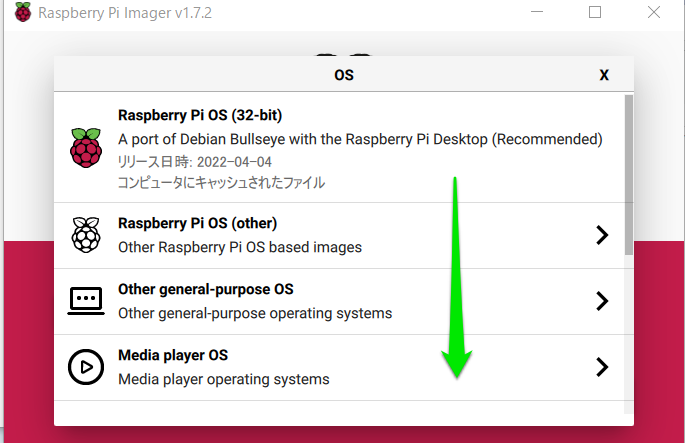
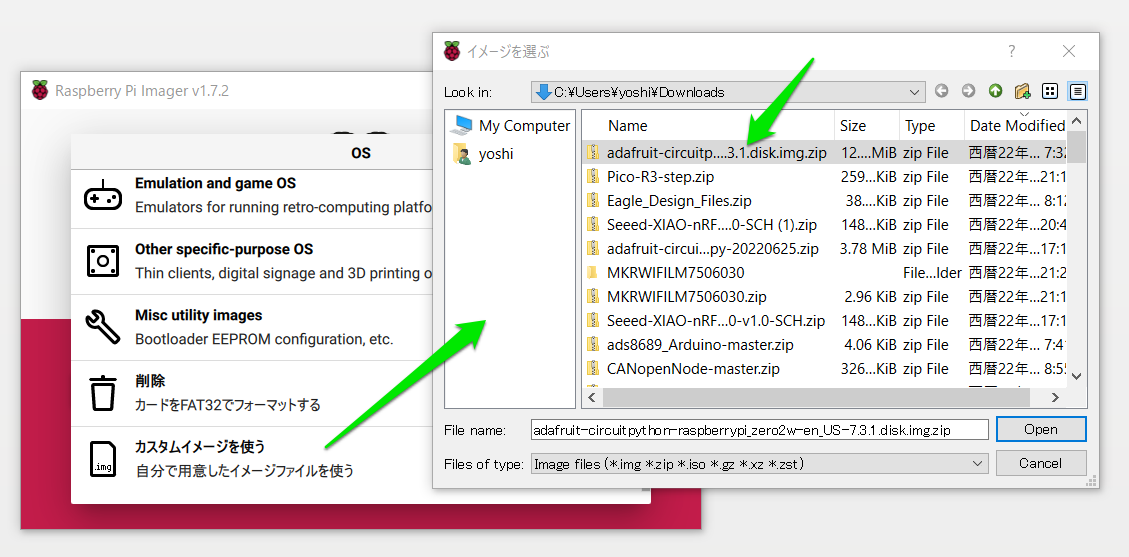
一番下にあるカスタムイメージを使うを選択します。エクスプローラが開くので、ダウンロードしたadafruit-circuitpython-raspberrypi_zero2w-en_US-7.3.1.disk.img.zipを選択します。
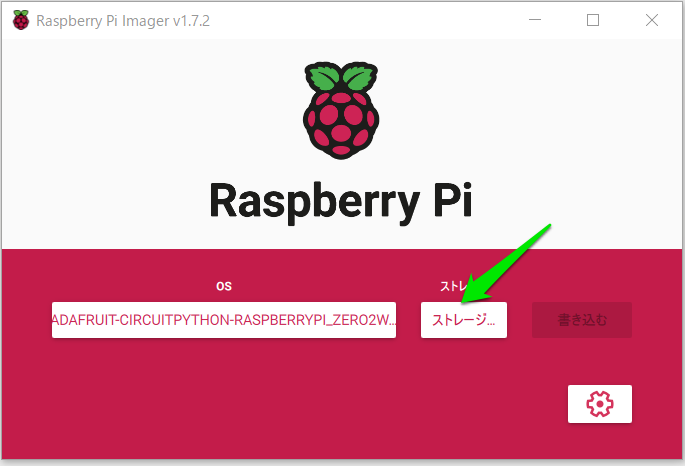
ストレージをクリックします。
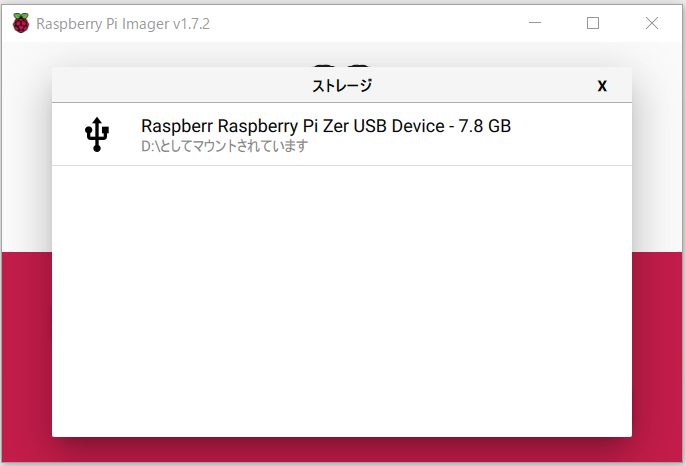
8GBのSDメモリーを選択しました。
書き込みます。
書き込みが終了したメッセージが出たら、SDメモリーを書き込み機から外し、ラズパイのSDソケットに差し込みます。
PWR INとシルク印刷された法のmicroUSBコネクタに5V 2.5A程度の電源をつなぎます。
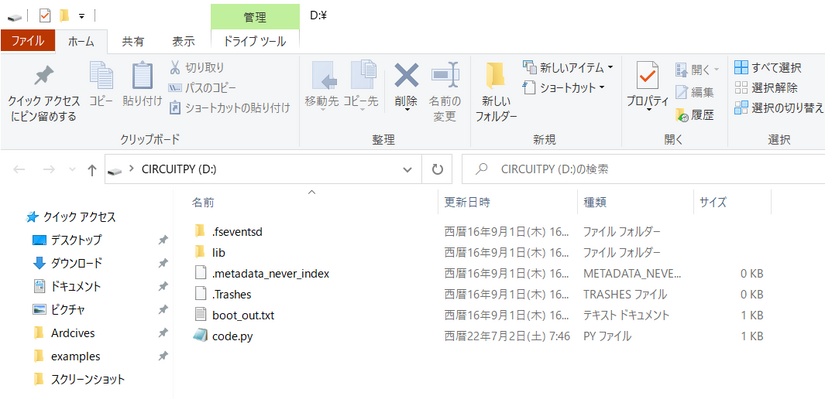
USBとシルク印刷された法のmicroUSBコネクタと、PCをUSBケーブルで接続します。マウントされます。CIRCUITPY(D:)ドライブでした。
エディタMuを立ち上げます。ボードを認識し、CircuitPythonが立ち上がります。
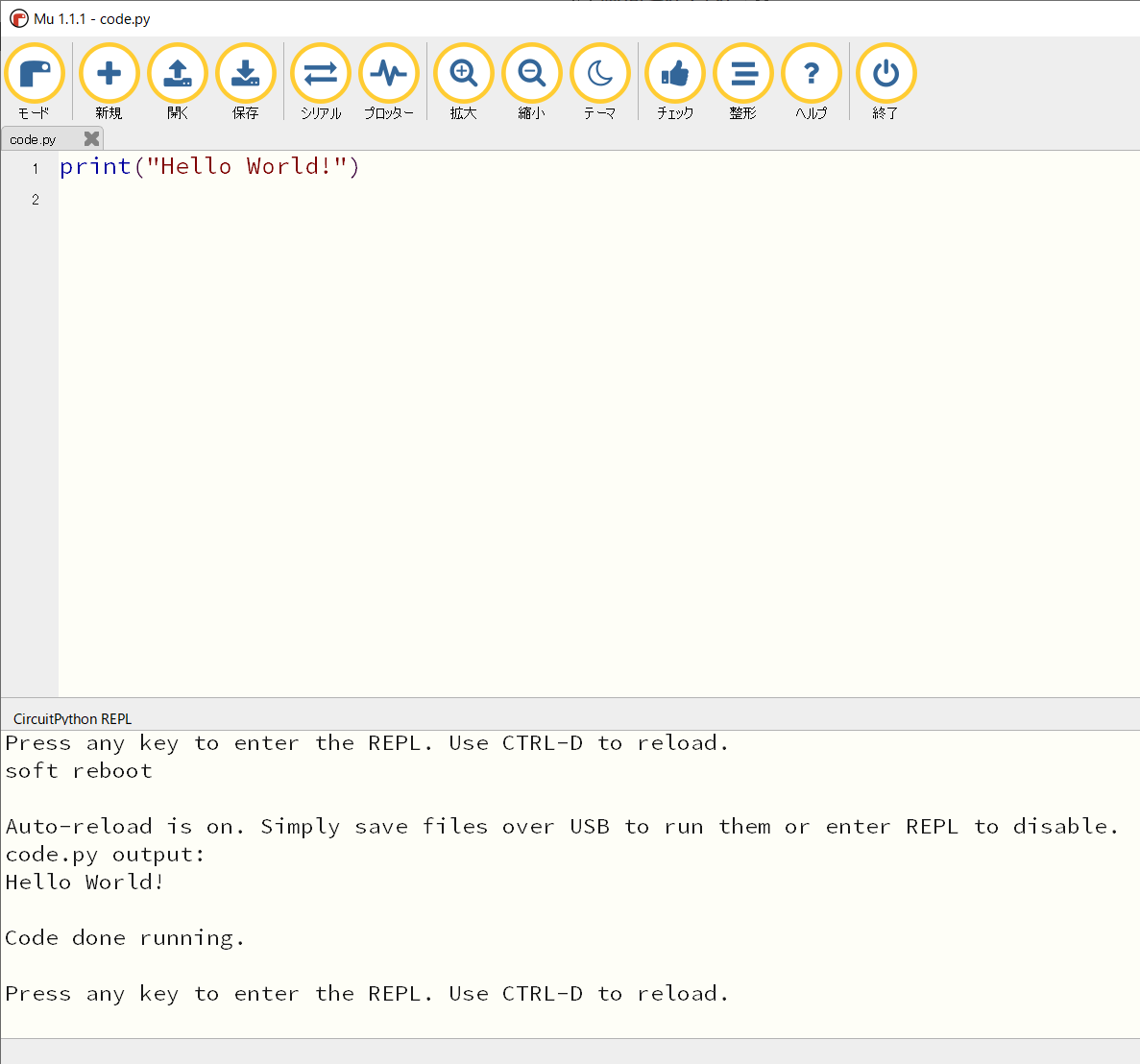
シリアルをクリック、保存をクリックすると、print文が実行されます。
STEP2 最新のライブラリlibとexampleをダウンロードします。
https://github.com/adafruit/Adafruit_CircuitPython_Bundle/releases
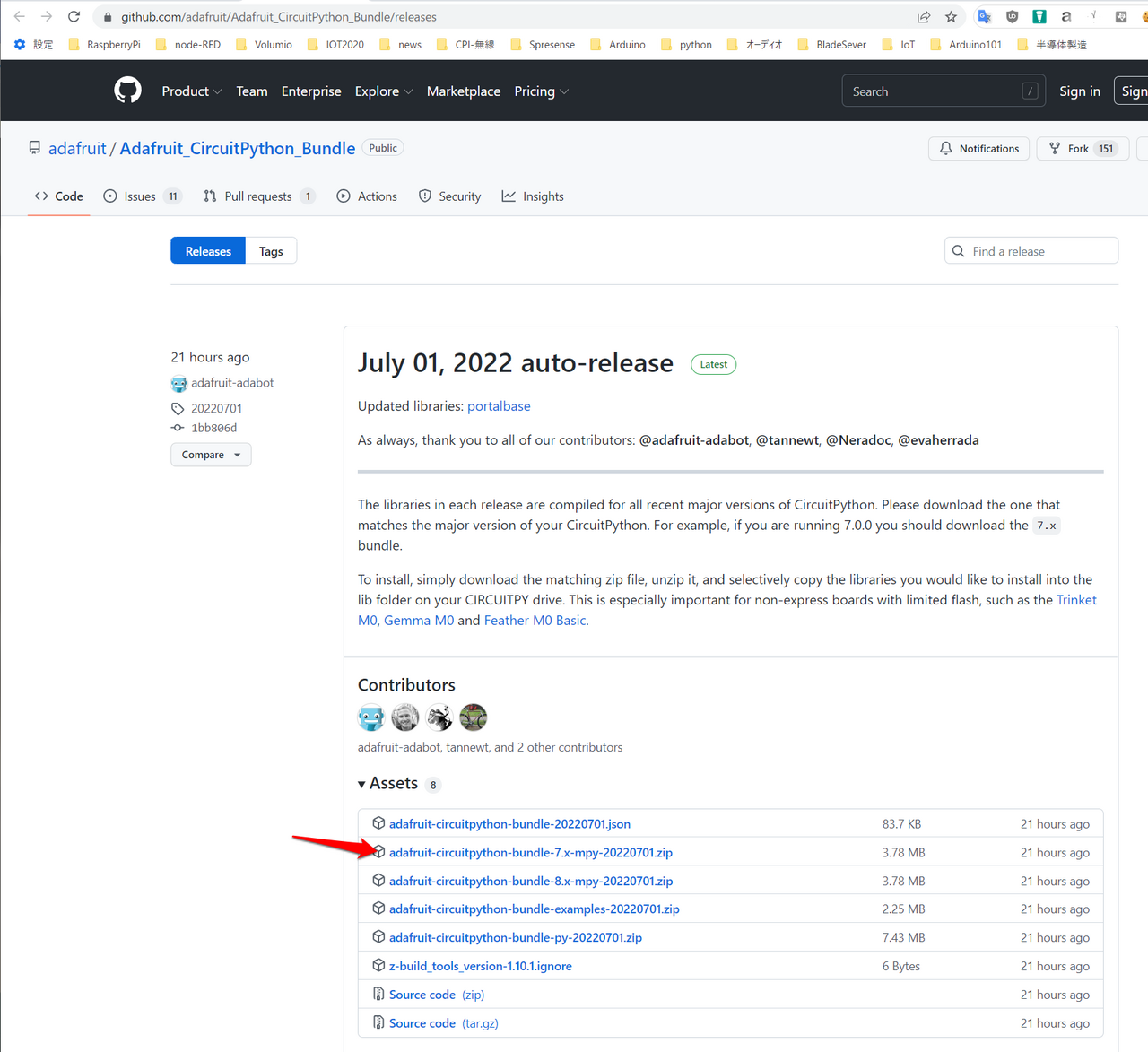
解凍して、libはCIRCUITPYドライブのlibへ、examplesはMuを動かしているPCへコピーします。
プログラミングはMuエディタを使います。
●中断
サンプルを動かしていると、止まってしまいます。
2600秒ぐらいで停止するようです。何かしら修正版が出たら、再開します。
●再開か
ひとつ前のモデルRaspberry Pi Zero Wでは、問題なく動作が止まらずに動くことが確認できました。上記のRaspberry Pi Zero 2 WをRaspberry Pi Zero Wと読み替えてください。Raspberry Pi Zero Wは、シングルコアです。
しかし、どこのショップでも販売されていないようなので、中断します。