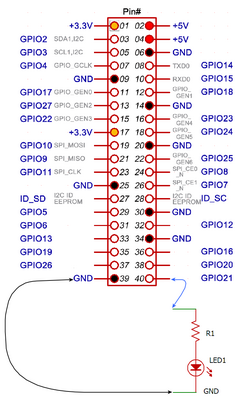
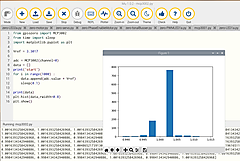
GPIOを利用します。利用できるPythonのライブラリはgpiozeroだけと思われます。 ●環境 Windows11;24H2 コマンドプロンプト sshでアクセス Raspberry Pi 5
使用環境 Raspberry Pi Raspberry Pi 4 Model B 2MB OS Raspberry Pi OS(32ビット)5.10.17 Python3 3.7.3 gpiozero
使用環境 Raspberry Pi Raspberry Pi 4 Model B 2MB OS Raspberry Pi OS(32ビット)5.10.17 Python3 3.7.3 gpiozero

使用環境 Raspberry Pi Raspberry Pi 4 Model B 2MB OS Raspberry Pi OS(32ビット)5.10.17 Python3 3.7.3 gpiozero

使用環境 Raspberry Pi Raspberry Pi 4 Model B 2MB OS Raspberry Pi OS(32ビット)5.10.17 Python3 3.7.3 gpiozero
使用環境 Raspberry Pi Raspberry Pi 4 Model B 2MB OS Raspberry Pi OS(32ビット)5.10.17 Python3 3.7.3 gpiozero
使用環境 Raspberry Pi Raspberry Pi 4 Model B 2MB OS Raspberry Pi OS(32ビット)5.10.17 Python3 3.7.3 gpiozero

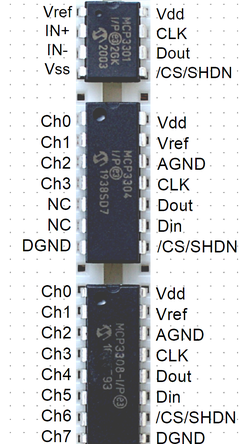
gpiozeroパッケージの基底クラスSPI( Serial Peripheral Interface )Devicesは、A-Dコンバータのクラスがたくさん用意されています。いずれもマイクロチップの
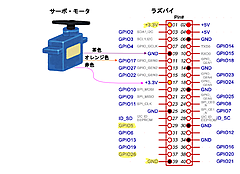
前回のServoクラスは、単に角度を変更するだけでした。ここで利用するAngularServoクラスは、最初にmin_angle値とmax_angle値を設定しておけば、その範囲の数値を指定して任意の
前回まではDCブラシありモータを駆動するHブリッジICを使いました。ここでは、ラジコンや小さなロボットに使われるサーボ・モータのクラスServoを利用します。産業用機器の位置決めなどに用いられるモータ
前回までクラスMotorで次のデバイスを利用しました。 モータ電圧[V] 電流[A] チャネル その1 BD65496 4.5~36 1.2A 1 その2 TB67H420FTG 10〜47 シングル
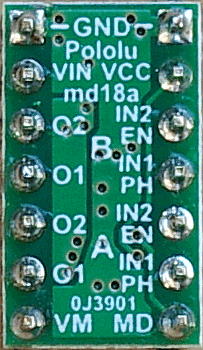
クラス(ライブラリ)Motorの動作確認を、 BD65496 その1 TB67H420FTG その2 TB6612 その3 三つのHブリッジICで行いました。さらにもう一つ、pololuのブレークアウ
クラス(ライブラリ)Motorの動作確認を、 BD65496 その1 TB67H420FTG その2 二つのHブリッジICで行いました。もう一つ、秋月電子通商で入手したTB6612モジュールを使います
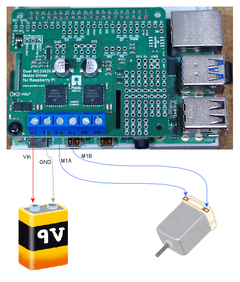
前回と同じMotorライブラリを使います。ハードを変更して、東芝のHブリッジ・ドライバのTB67H420FTGを利用します。スイッチサイエンスで入手したpololuのブレークアウト・ボードです。 ●T
DCブラシありモータは、電源の極性で回転方向が決まります。したがって、CW(clockwise、時計回り)方向とCCW(counterclockwise、逆)方向の切り替えをつないだまま変更するには、
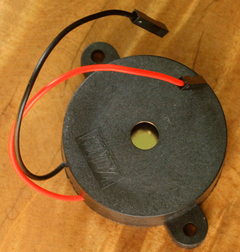
今回のTonalBuzzerで利用するブザーは他励振タイプです。スイッチサイエンスで入手しました。 ●「圧電スピーカーANYM-SPT08」のおもなスペック 動作電圧 ?~30V 動作電流 実測3.3
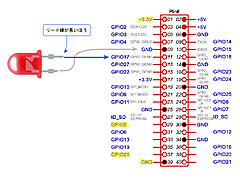
前回、「gpiozeroライブラリ入門④import RGBLED」で調べたように、GPIOポートが最初にHighだと、ブザーをつなぐとプログラムが動く前から音が鳴ります。 今回のBuzzerは自励式

出力のLED、PWMLEDに続き、RGBLEDです。RGBのLEDが一つのパッケージに入っているデバイスです。それぞれの輝度が異なるけど、うまく制御すれば、きれいなフルカラーの表示が可能です。 一つの
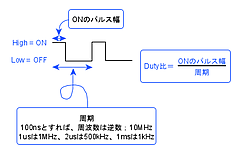
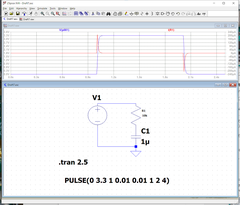
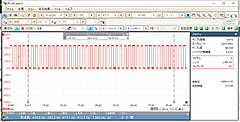
PWMはPulse Width Modulationの略で、次の二つのパラメータをもちます。 周波数 ディーティ(Duty)比 使用環境 Raspberry Pi Raspberry Pi 4 Mod
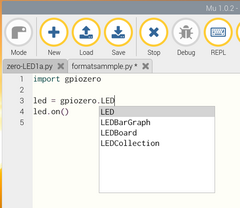
LEDクラスの詳細です。 クラスの中に複数のメソッドがあります。メソッドはクラス・オブジェクトとも呼ばれます。 クラス gpiozero.LED(pin,*,active_high=True,init
使用環境 Raspberry Pi Raspberry Pi 4 Model B 2MB OS Raspberry Pi OS(32ビット)5.4.72 Python3 3.7.3 gpiozeroラ
