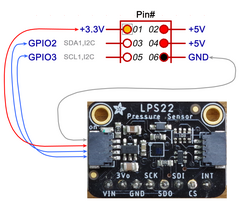
前回、下記の環境で、I2Cのアクセスまで実験しました。それまでのOSと変わらない使い勝手でした。 ●環境 ハードウェア Raspberry Pi 4(4GBモデル) OS Raspberry Pi O
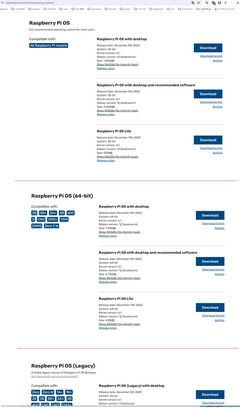
ラズパイのOSは、2023年10月に、それまで描画関係がX11ベースだったものが大幅に変更されました。ラスパイの見た目などに変化はないように開発が行われたようですが、使えなくなったソフトもあるようです

SHT31で測定した温湿度をBLEで通信できるようにしました。前回ラズパイはサーバの立場のペリフェラル動作です。ここでは、Raspberry Pi Zero Wでセントラルのプログラムを動かし、14セ
前回のServoクラスは、単に角度を変更するだけでした。ここで利用するAngularServoクラスは、最初にmin_angle値とmax_angle値を設定しておけば、その範囲の数値を指定して任意の
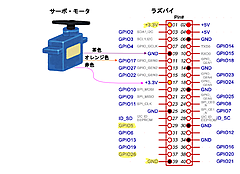
前回まではDCブラシありモータを駆動するHブリッジICを使いました。ここでは、ラジコンや小さなロボットに使われるサーボ・モータのクラスServoを利用します。産業用機器の位置決めなどに用いられるモータ
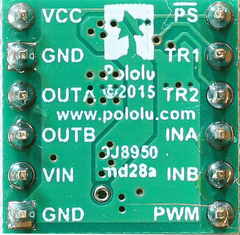
前回までクラスMotorで次のデバイスを利用しました。 モータ電圧[V] 電流[A] チャネル その1 BD65496 4.5~36 1.2A 1 その2 TB67H420FTG 10〜47 シングル
クラス(ライブラリ)Motorの動作確認を、 BD65496 その1 TB67H420FTG その2 TB6612 その3 三つのHブリッジICで行いました。さらにもう一つ、pololuのブレークアウ
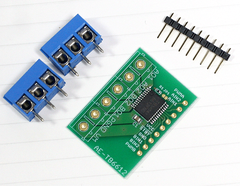
クラス(ライブラリ)Motorの動作確認を、 BD65496 その1 TB67H420FTG その2 二つのHブリッジICで行いました。もう一つ、秋月電子通商で入手したTB6612モジュールを使います
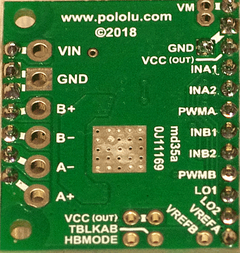
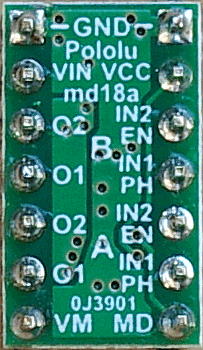
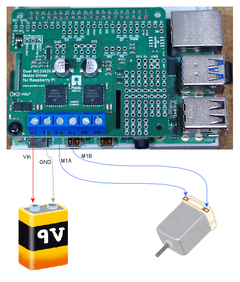
前回と同じMotorライブラリを使います。ハードを変更して、東芝のHブリッジ・ドライバのTB67H420FTGを利用します。スイッチサイエンスで入手したpololuのブレークアウト・ボードです。 ●T
DCブラシありモータは、電源の極性で回転方向が決まります。したがって、CW(clockwise、時計回り)方向とCCW(counterclockwise、逆)方向の切り替えをつないだまま変更するには、
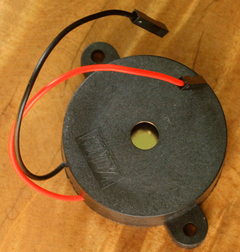
今回のTonalBuzzerで利用するブザーは他励振タイプです。スイッチサイエンスで入手しました。 ●「圧電スピーカーANYM-SPT08」のおもなスペック 動作電圧 ?~30V 動作電流 実測3.3
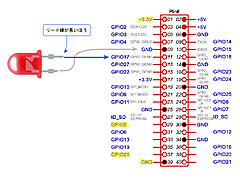
前回、「gpiozeroライブラリ入門④import RGBLED」で調べたように、GPIOポートが最初にHighだと、ブザーをつなぐとプログラムが動く前から音が鳴ります。 今回のBuzzerは自励式

出力のLED、PWMLEDに続き、RGBLEDです。RGBのLEDが一つのパッケージに入っているデバイスです。それぞれの輝度が異なるけど、うまく制御すれば、きれいなフルカラーの表示が可能です。 一つの
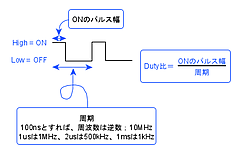
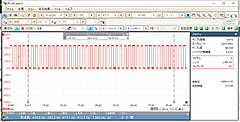
PWMはPulse Width Modulationの略で、次の二つのパラメータをもちます。 周波数 ディーティ(Duty)比 使用環境 Raspberry Pi Raspberry Pi 4 Mod
使用環境 Raspberry Pi Raspberry Pi 4 Model B 2MB OS Raspberry Pi OS(32ビット)5.4.72 Python3 3.7.3 gpiozeroラ

IPv4だけを取り上げます。 使用環境 Raspberry Pi Raspberry Pi 4 Model B 2MB OS Raspberry Pi OS(32ビット)5.4.72 ●現在のIPアド
