ラズパイ5 +Python+CANopenでモータを回す ⑧ CANバス信号を見る<中編>Arduino
CANバスの信号を見るため、前回は、オシロスコープと、IXXATのUSB-to_CAN V2 Compactに付属するcanAnalyser3 Miniというユーティリティ、Linuxのcan-utilsを利用しました。
ここでは、Arduinoで観測します。
●Arduino UNO R4 WiFiのCAN
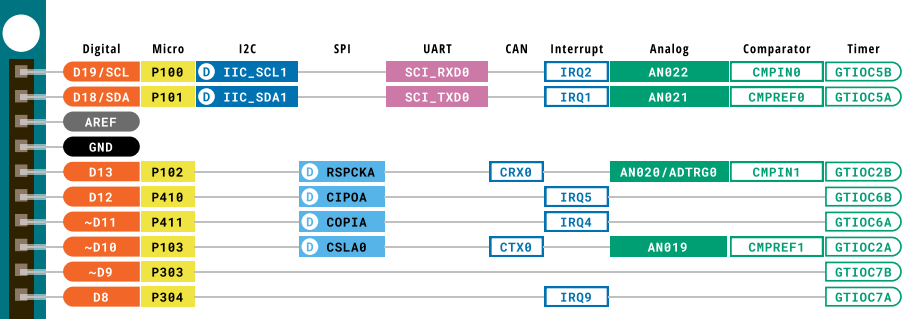
このArduino UNO R4 WiFiは、I/Oピンに、CAN信号があります。レベル変換は、下記の記事によれば、
SN65HVD230を利用しています。スイッチサイエンスで購入しました。
CAN信号は、D13(CRX0)とD10(CTX0)に出ています。
●接続
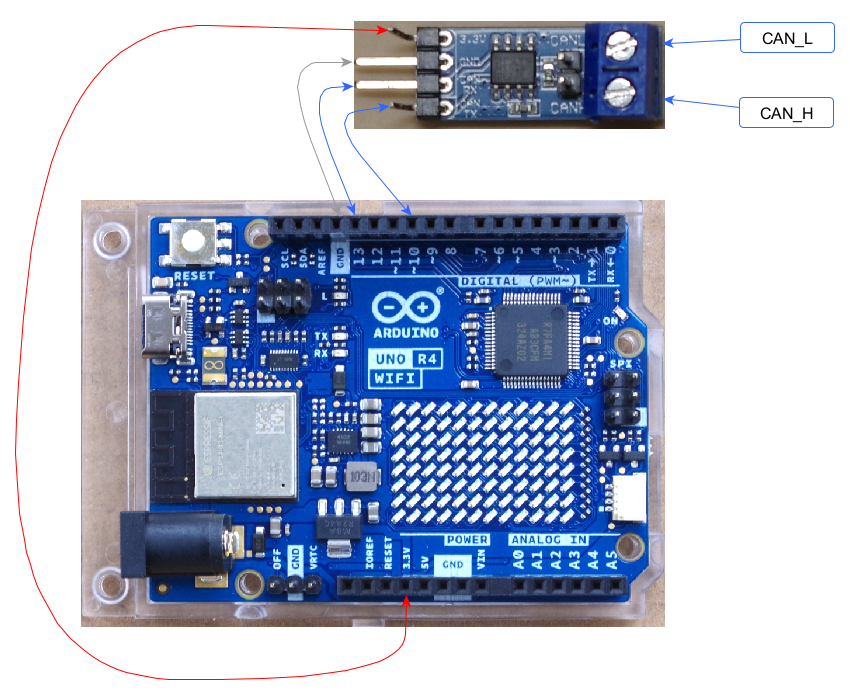
赤色の経路でリードします。
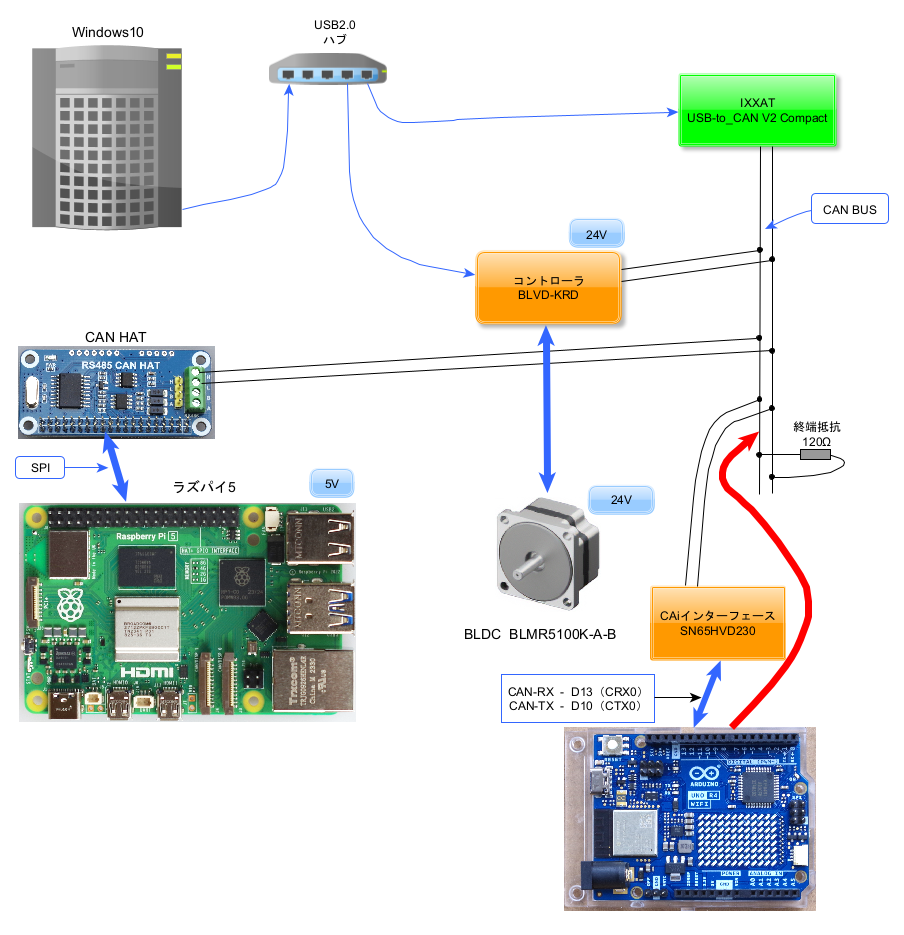
SN65HVD230ボードとの接続です。
●ArduinoのCANライブラリ
●CANバスのread
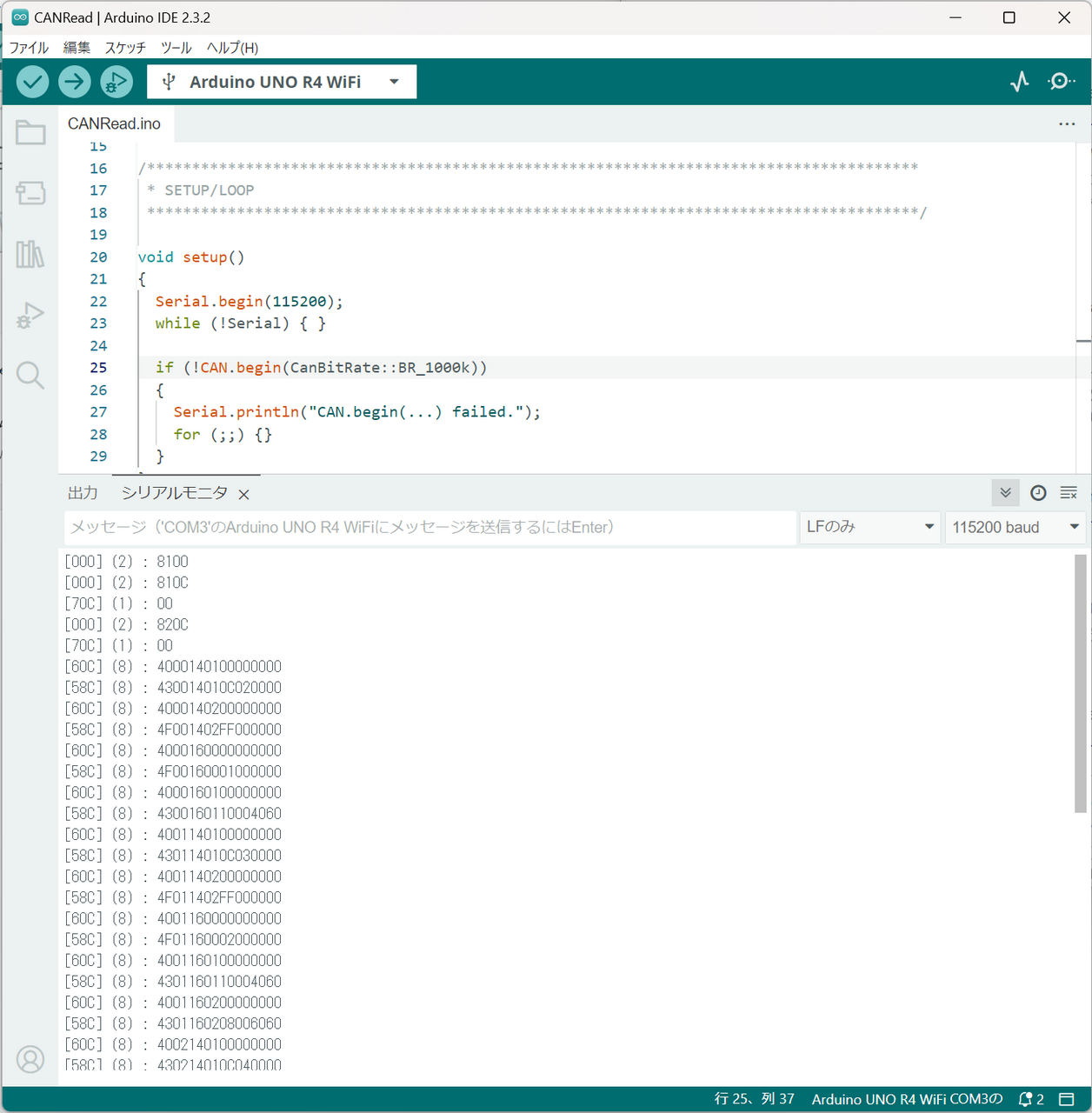
File > Examples > Arduino_CAN にCANWrite、CANReadのサンプル例があります。CANReadでCANバスのデータを読み込みます。
25行の速度BR_250kをBR_1000kに修正し、コンパイル、アップロードします。
Arduino IDEのシリアルモニタを開き、ラズパイのターミナルで前回のcanreset.pyを実行します。CANバスを流れるデータが記録できました。
{kind=link}