コンテックRAS/RTC Raspberry Pi ボードを使う①ドライバのインストール
コンテックから、ラズパイの上に重ねて使う各種ボードが発売されました。出荷は、4月の末から5月の中頃です。
|
●これから利用するCPI-RASボードのおもなスペック
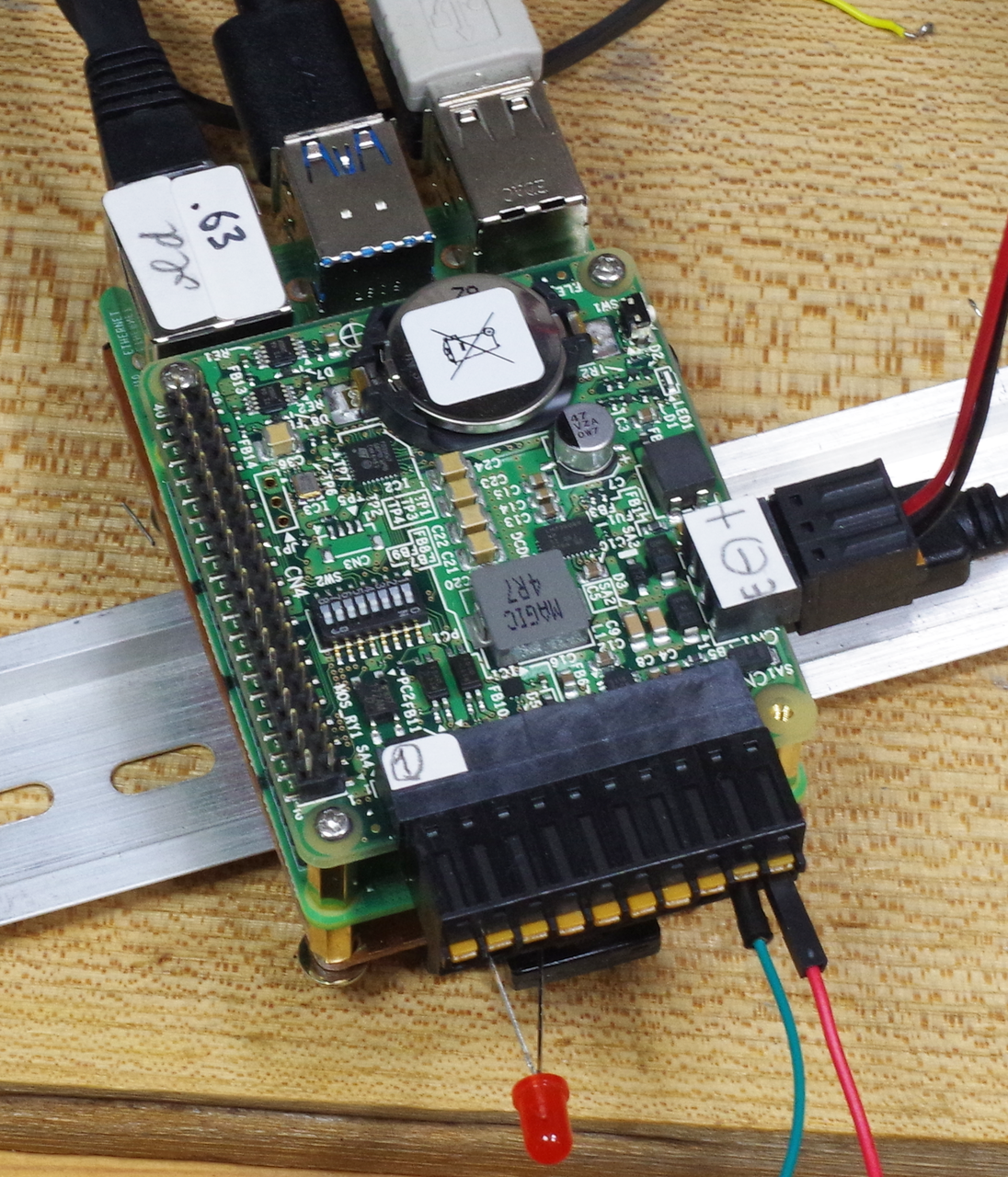
- 温度補償リアルタイム・クロック(RTC)搭載
- 入力2。フォト・カプラ非絶縁入力(電流シンク出力対応)、負論理、内蔵電源3.3V、入力抵抗(電流制限:220Ω、分流抵抗:1kΩ)、入力ON電流(6.4mA(typ))、入力信号電圧(3.3~28VDC)
- 出力1。半導体リレー出力、絶縁耐圧(AC1000Vrms)、出力耐圧(最大 28VAC/DC)、出力電流 (最大 200mA)、
- 電源(8~28Vdc入力)。ラズパイへ電源を供給
- I2Cバス(I2C1) 0x2cと0x32アドレスを使用
●準備
ダウンロードしたリファレンス・マニュアルに従って、組み立てます。ネジは2.6mmΦのようなので、2.5mmΦと組み合わせて利用できません。
ラズパイ本体は、電源をつなぎません。CPI-RASボードから配給されます。
●電源回り
24V/1.7Aの電源を用意しました。CPI-RASボード自体は28V時6mAと少ないです。ラズパイ4は通常5V/1Aを超えることはありません。ここで利用しているラズパイ4は、SSDブートにしています。
●ドライバ2本
CPI-RASのWebページから、サポート・ダウンロード・タブにある、ドライバを2本、ラズパイでダウンロードします。
- RTC Driver for CPI-RAS Ver.1.00
- ARM Linux用 RASドライバ CORAS(LNX) for ARM Ver.1.00
ダウンロードしたものは、ラズパイのDownloadsフォルダに入っています。インストールできるOSは、次の二つです。Raspberry Pi OSにインストールします。
|
ディストリビューション カーネル・バージョン Ubuntu server |
対応Raspberry Piモデルは、次の3機種です。
Rasberry Pi 4 Model B
Rasberry Pi 3 Model B+
Rasberry Pi 3 Model B
●入出力機能RASドライバのインストール
ターミナルで、Downloadsフォルダにおります。
tar xvf CORASLNX_arm_100.tgz
で解凍します。
cd ./CORASLNX_arm_100
sudo make install
必要なシェアード・ライブラリなどがインストールされます。
make sample
サンプルがコンパイルされます。
/dio .................. 汎用入出力のコンソール・サンプル(read/write、5V外部電源出力、8 - 28V外部電源のON)
/hwmon ................ ハードウェア・モニタのコンソール・サンプル
/sled ................. ステータスLEDの制御サンプル
/wdt .................. ウォッチドッグ・タイマの制御サンプル
●RTCのドライバのインストール
ターミナルのhome/piで、カーネル・ヘッダのパッケージをインストールします。
sudo apt install raspberrypi-kernel-headers
Downloadsフォルダにおります。解凍します。
tar xvfz CPI-RAS-rtcDrv_100.tgz
ビルドします。
cd rv8803drv
make
ビルドしたドライバをインストールします。
sudo make modules_install
次のコマンドでRTCドライバをロードします。
sudo sh -c 'echo rx8900 0x32 > /sys/class/i2c-adapter/i2c-1/new_device'
次のコマンドで、存在を確認します。
lsmod
rtc_rv8803 が見つかればインストールは正常に行われています。
sudo hwclock -r で今の時刻を表示します。
