gpiozeroライブラリ入門⑦import Motor その1 BD65496
DCブラシありモータは、電源の極性で回転方向が決まります。したがって、CW( clockwise、時計回り)方向とCCW(counterclockwise、逆)方向の切り替えをつないだまま変更するには、Hブリッジ回路が使われます。
●使用したHブリッジIC BD65496MUVボードのおもなスペック
スイッチサイエンスから入手したPoluloのボードを利用します。
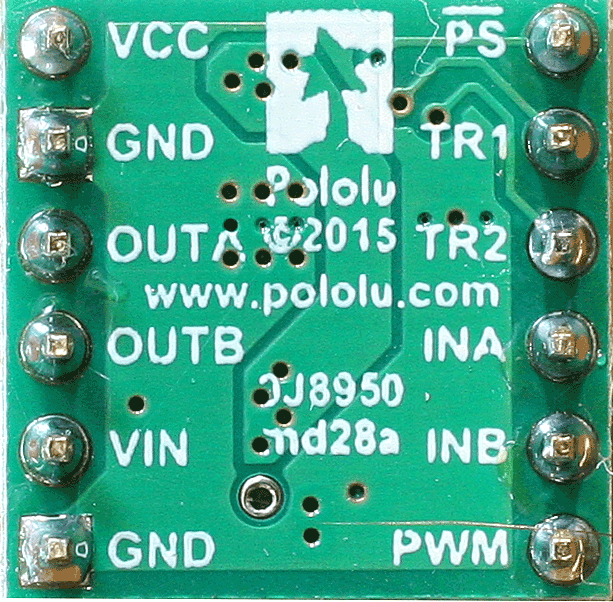
- 対応モータ電圧 4.5~36V
- ロジック電圧 2.5~5.5V
- 定格電流 1.2A @12V
- ピーク電流 5A
●使用したモータ
スイッチサイエンスから入手しました。ノイズ対策用にセラミック・コンデンサが端子間にはんだ付けされています。
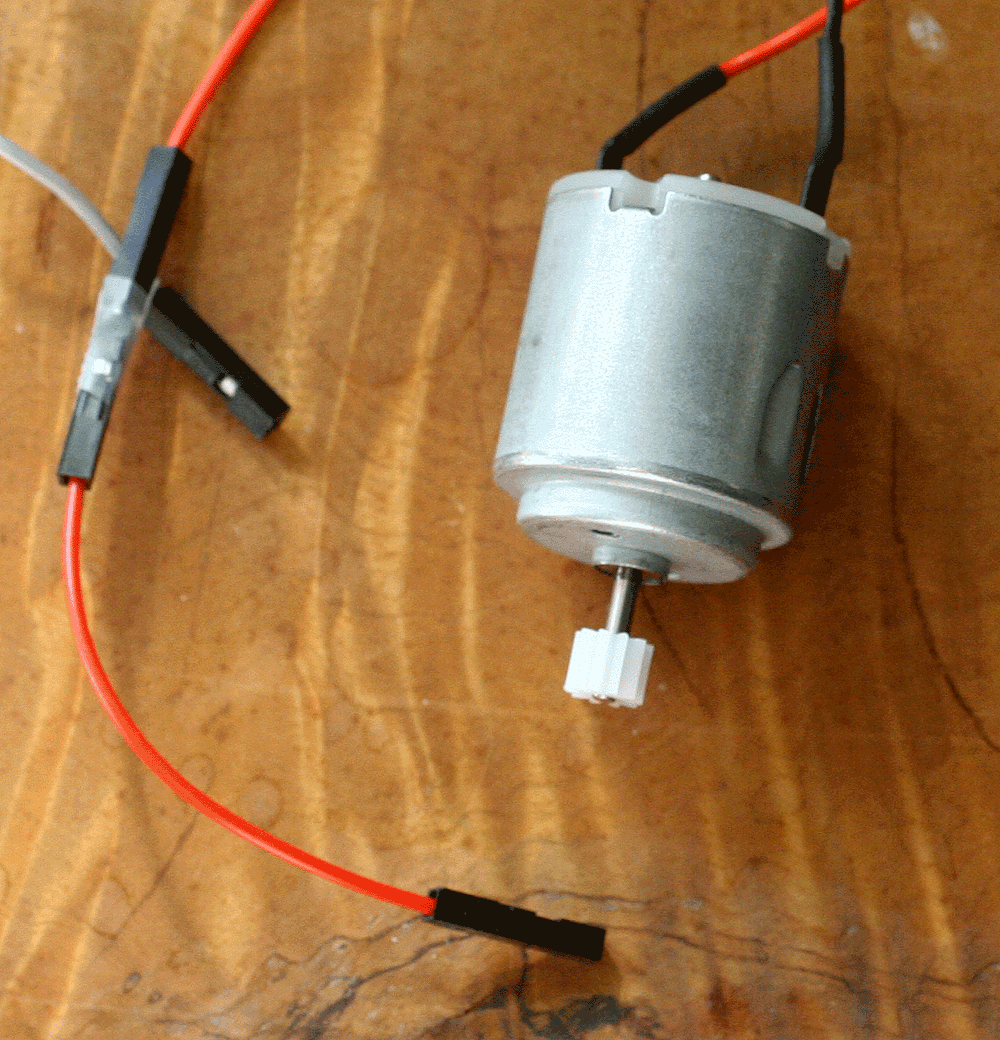
- 定格電圧 3.0V
- 電源電圧 1.0~3.0 V(~12V)
- 無負荷時回転数(1.0 V、110 mA時) 6600±10% rpm
- 無負荷時電流 最大110mA
- ストール時電流 0.8 A
- 重量 約26 g
●クラス
クラスgpiozero.Motor(forward, backward, *, pwm=True, pin_factory=None) CompositeDeviceを拡張し、双方向モータ・ドライバ回路(つまりHブリッジ)に接続されたモータを駆動する。 パラメータ; forward (int or str) – モータ・ドライバ・チップの前方入力であるGPIOピンに接続されている。有効なピン番号については、ピン番号を参照。これがNoneの場合、GPIODeviceErrorが発生する。
|
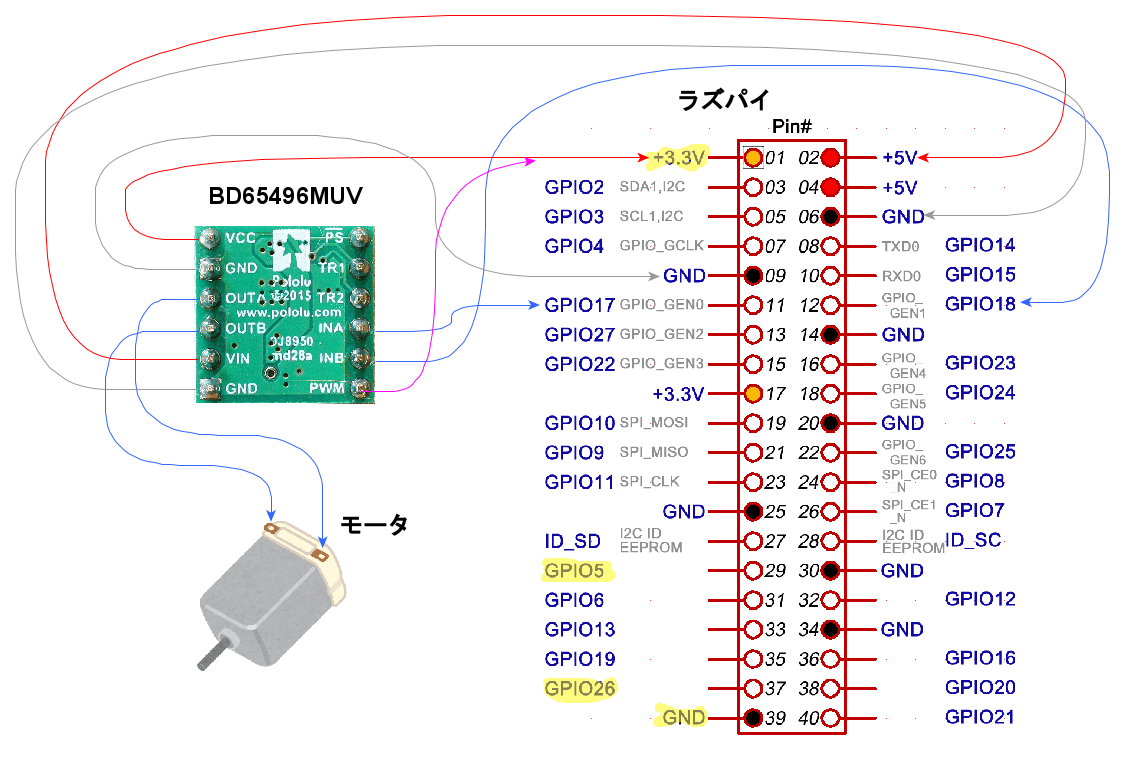
●接続-1
入力INA/INBにPWM信号を入れる接続です。
●プログラム
backward()の引数speedが0.08以下だと回転を始めませんでした。
from gpiozero import Motor from time import sleep motor = Motor(17, 18) motor.backward(0.09) sleep(3) motor.stop() |
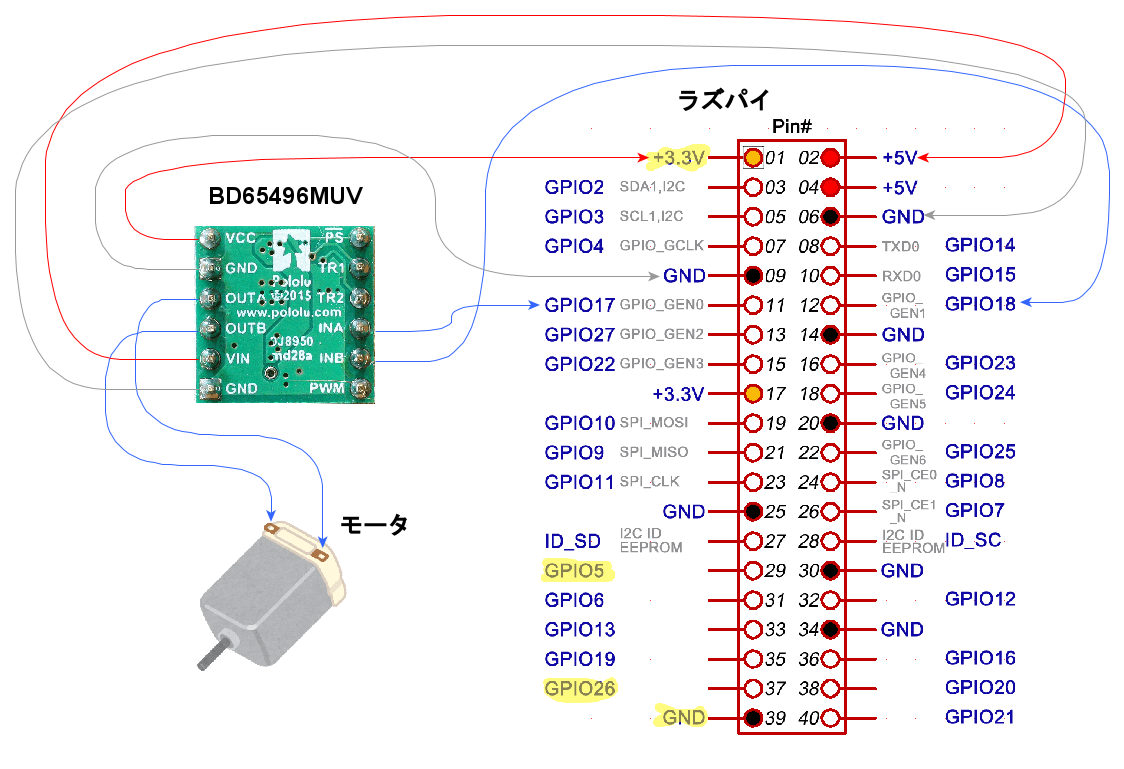
●接続-2
入力INAにPWM信号を、入力INBにdirection信号を入れる接続です。PWM端子を3.3Vにつなぎ、クラスを使うとき、引数にpwm=Falseを追加します。
speedのパラメータは'0'もしくは'1'に限定され、回転速度の調整はできませんでした。
from gpiozero import Motor from time import sleep motor = Motor(17, 18, pwm=False) motor.forward(1) sleep(3) motor.stop() |