gpiozeroライブラリ入門⑧import Motor その2 TB67H420FTG
前回と同じMotorライブラリを使います。ハードを変更して、東芝のHブリッジ・ドライバのTB67H420FTGを利用します。スイッチサイエンスで入手したpololuのブレークアウト・ボードです。
●TB67H420FTGボードのおもなスペック
- モータ電源電圧 10〜47V
- チャネル 2もしくは1
- 出力電流
- デュアル・チャネル・モードで最大1.7A連続(4.5Aピーク)
- シングル・チャネル・モードで最大3.4A連続(9Aピーク)
- ロジック入力電圧 3~5V
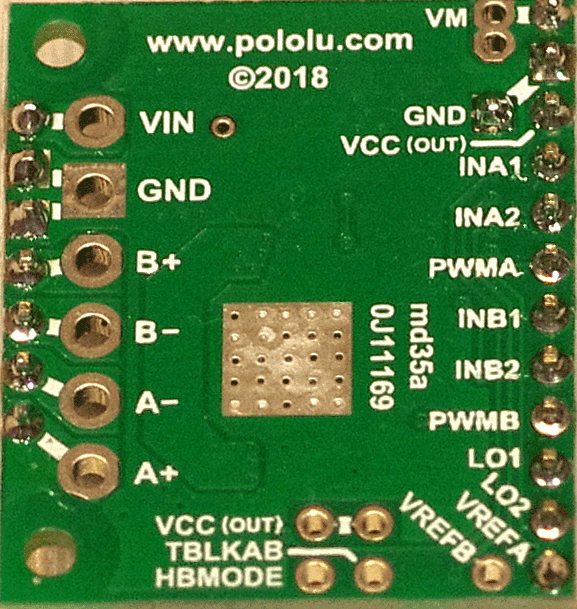
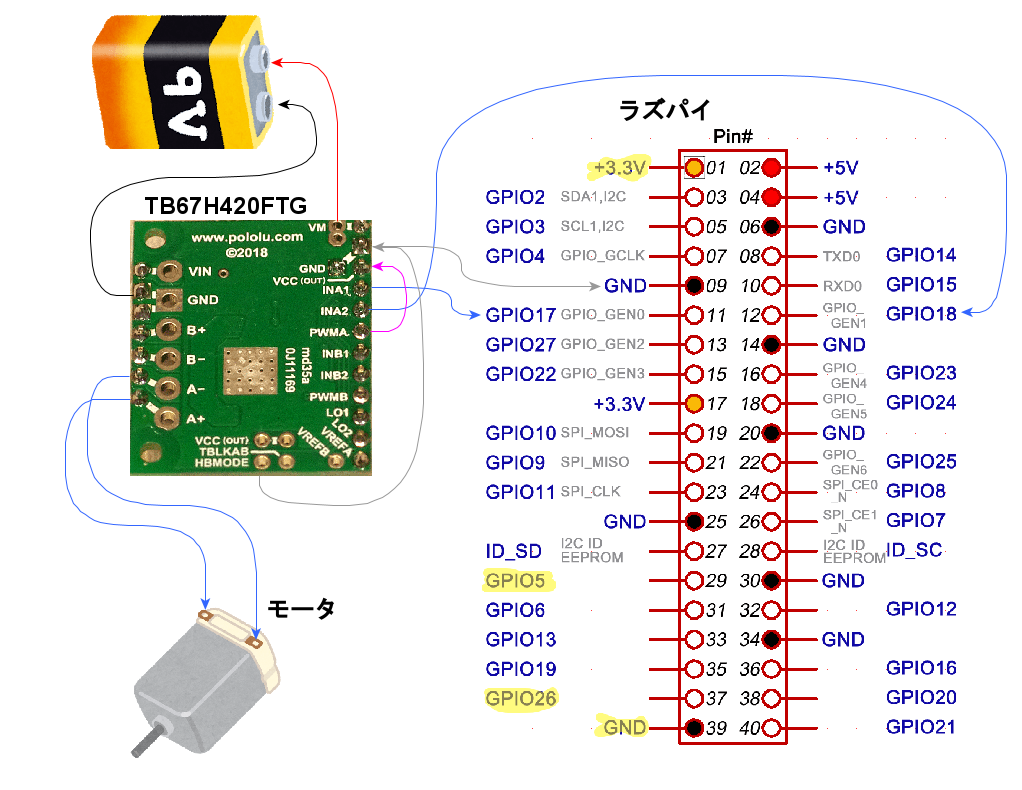
●接続
モータの電源は006Pの9Vを使いました。規格上10V以上なのですが、動きます。基板上Vin端子がモータ用電源入力ですが、逆電圧保護回路で電圧が下がるのをきらいVM端子につなぎました。ボードの回路図はPololuのサポートページに掲載されています。
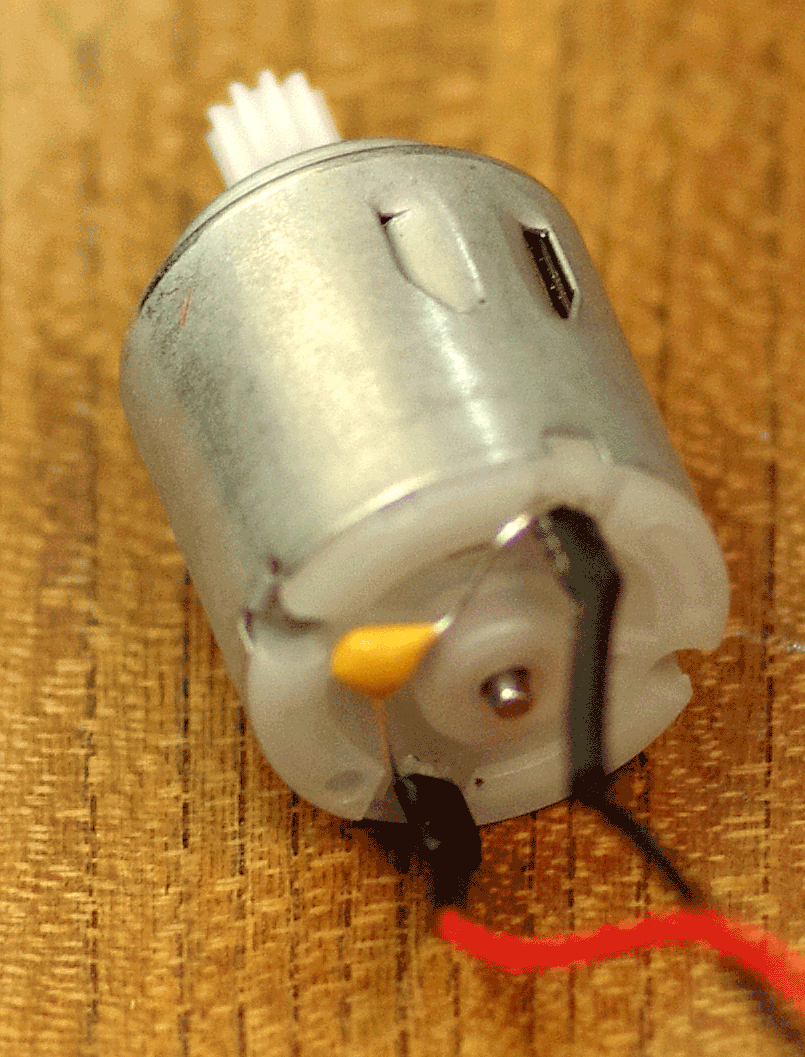
HBMODE端子をGNDへつないで、デュアル・チャネル・モードに設定し、Aチャネルだけを使います。入力端子はINA1、INA2がPWMを受け付け、回転動作をするためにPWMA端子をVccへつなぎます。モータにつなぐ出力端子はA-とA-です。モータは前回と同じ「ワイヤ付きホビーモーター 2736」です。
ICのスペックを見ると、大きめのモータを制御できるようです。電源電圧は40V以下が推奨で、発熱は大きいので、放熱器を取り付ける工夫をします。
●プログラム
from gpiozero import Motor from time import sleep motor = Motor(17, 18) motor.forward(0.1) sleep(3) motor.stop() |