Raspberry Pi Picoでプログラミング ⑥ Hello, World!
第2回でUARTでラズパイとPicoを接続しました。printf文を使って出力します。
●ソースとCMakeLists.txt
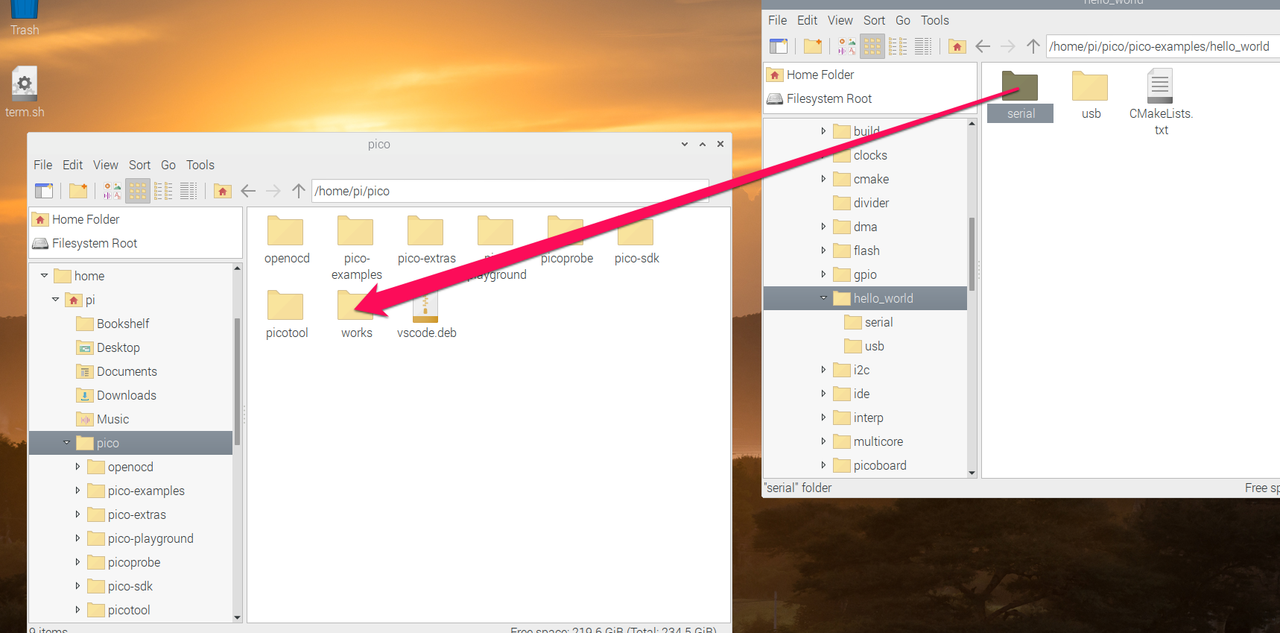
Hello, World!のプログラムに必要なのは、ソース・プログラムとCMakeLists.txtです。pico/pico-examplesのhello_worldフォルダに入っていますから、worksフォルダへコピペします。必要なのはserialフォルダです。
/home/pi/pico/worksにあるCMakeLists.txtを修正します。
cmake_minimum_required(VERSION 3.12)
# Pull in SDK (must be before project)
include(pico_sdk_import.cmake)
project(pico_examples C CXX ASM)
set(CMAKE_C_STANDARD 11)
set(CMAKE_CXX_STANDARD 17)
set(PICO_EXAMPLES_PATH ${PROJECT_SOURCE_DIR})
# Initialize the SDK
pico_sdk_init()
# Add blink example
add_subdirectory(cmake)
add_subdirectory(blink)
add_subdirectory(serial)ファイルの最後に、追加したフォルダの指定の1行追加しました。
コピーしてきた/home/pi/pico/works/serialの中身を見ます。
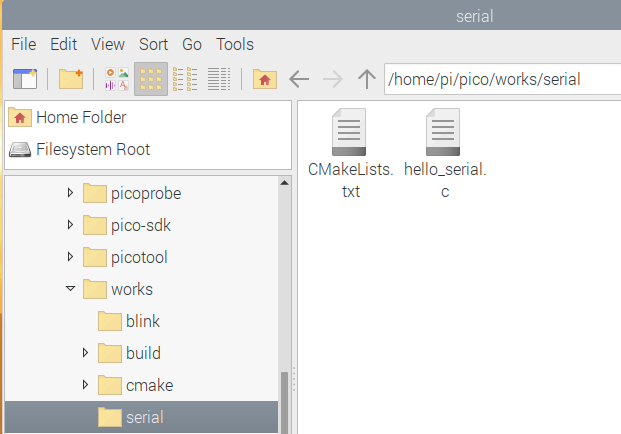
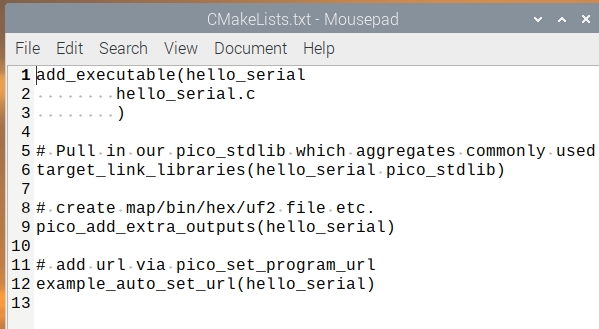
ソースのhello_serial.cとCMakeLists.txtですね。CMakeLists.txtを修正します。先ほどのCMakeLists.txtとは内容が異なります。11,12行を削除して保存します。
ターミナルを開き、~pico/works/buildまでおります。
cmake ..
終了したら、serialディレクトリにおります。
make -j4
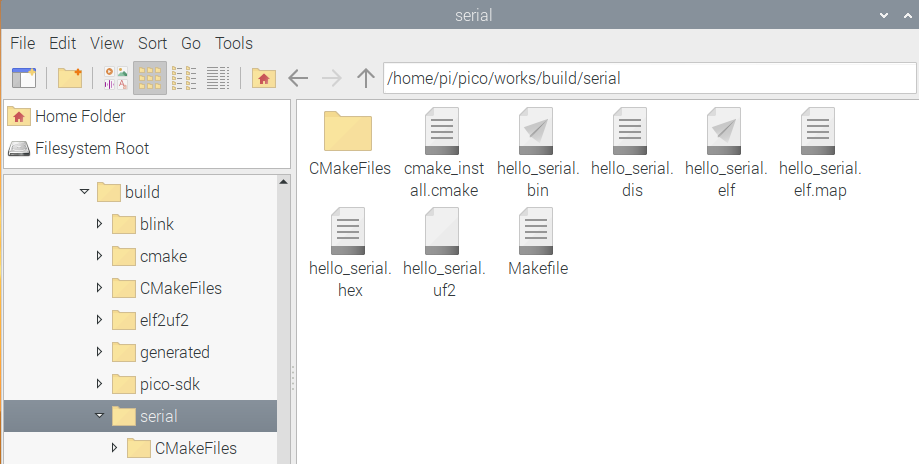
serialフォルダの中身です(ディレクトリとフォルダは同じ)。
●標準入出力を起動
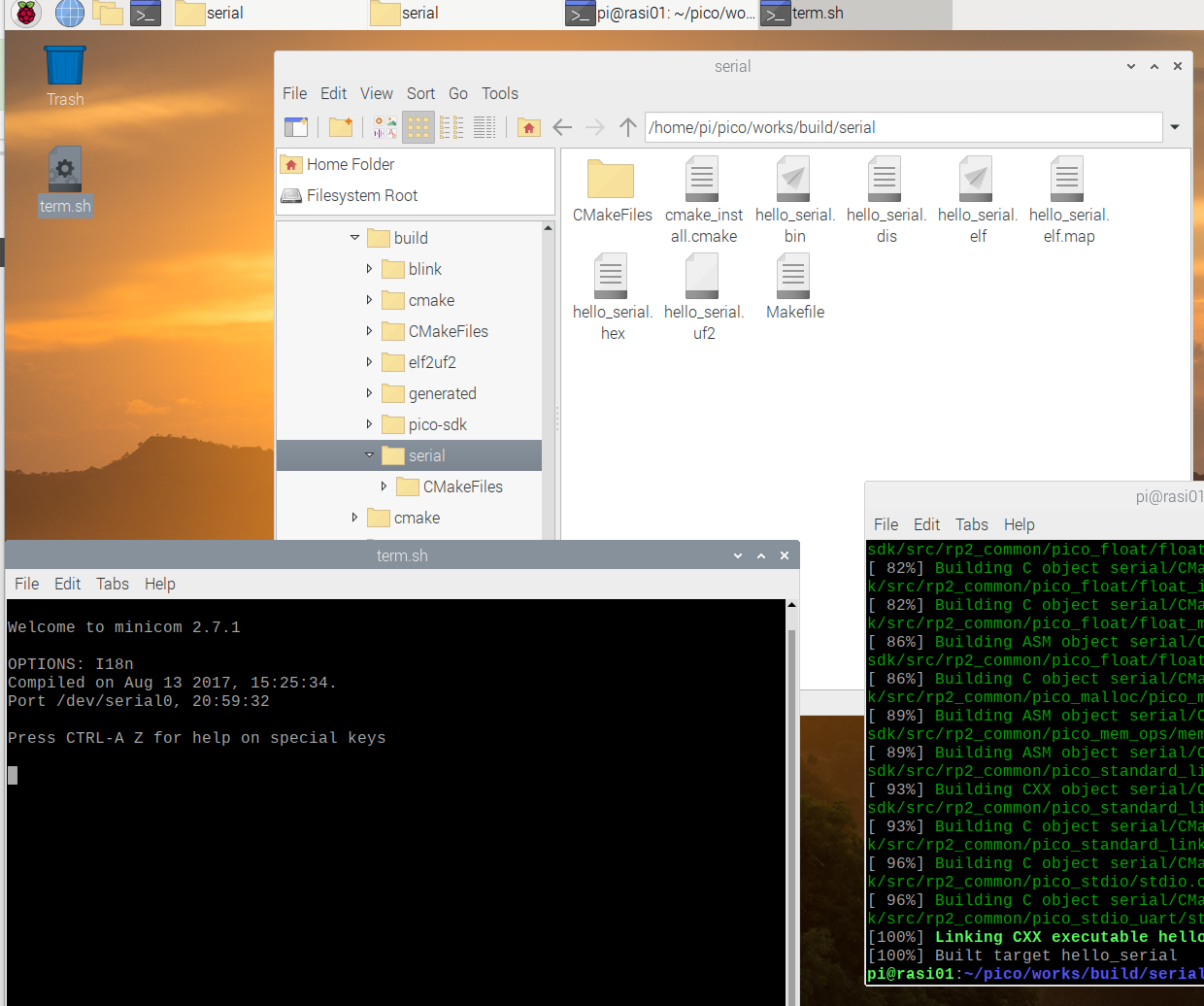
デスクトップに置いてあるterm.shのアイコンをダブルクリックして立ち上げます。
Resetボタンを押したまま、BOOTSELボタンを押し、Resetボタンを離してから、BOOTSELボタンを離します。RPI-RP2ドライブがマウントができます。
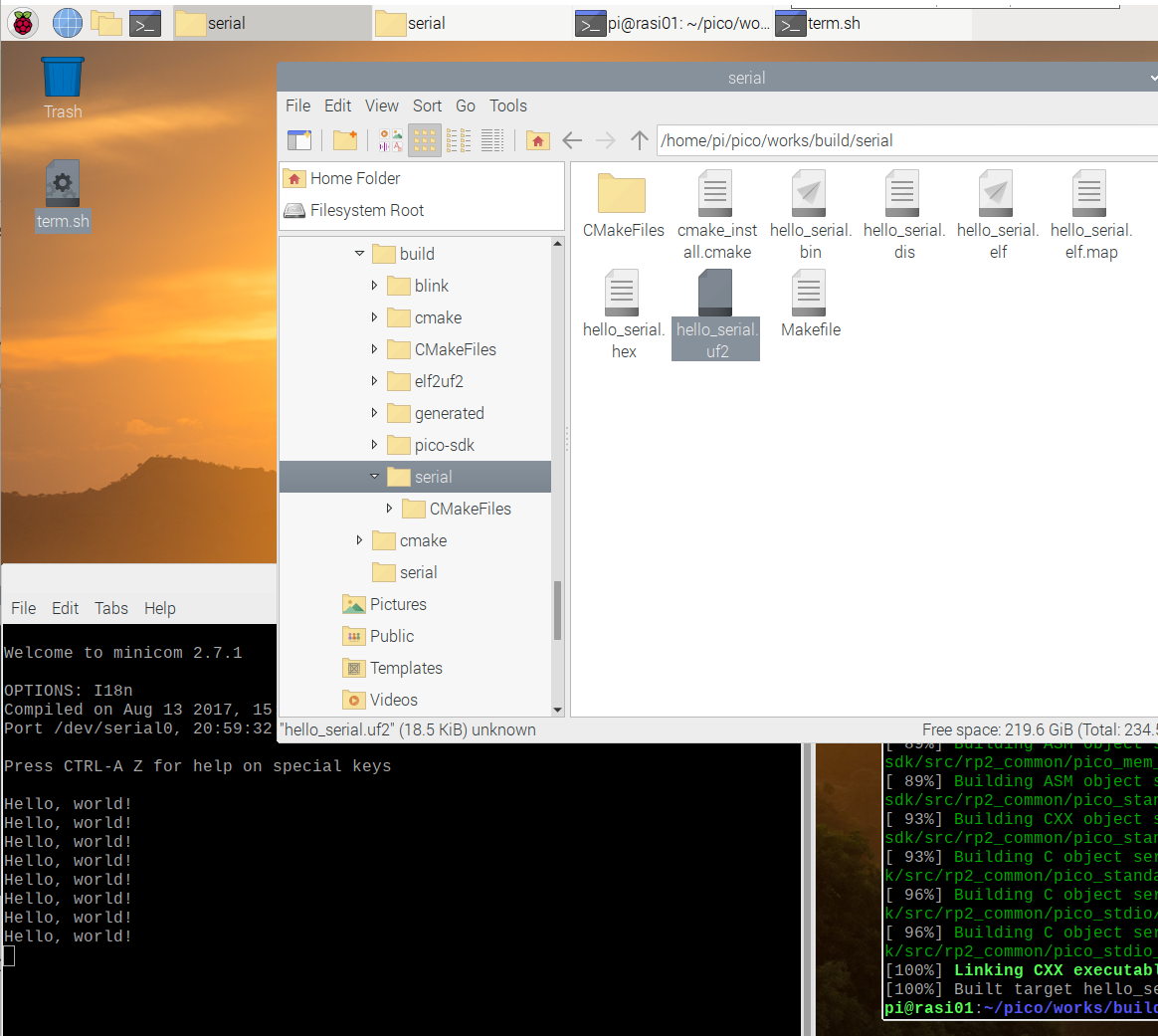
hello_serial.uf2を、RPI-RP2ドライブにドロップします。
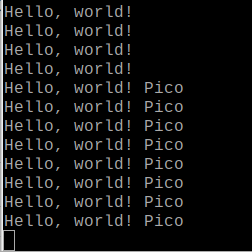
Hello, World!が表示されます。
●修正
printfの文字を修正、保存しました。
printf("Hello, world! Pico\n");
make -j4
を実行します。
Resetボタンを押したまま、BOOTSELボタンを押し、Resetボタンを離してから、BOOTSELボタンを離します。
hello_serial.uf2をRPI-RP2ドライブにドロップします。
Hello, World! Picoが表示されます。